如何查看机器人的位置状态
上一节
下一节
位置状态:
POSITION 屏幕以关节角度或直角坐标系显示位置信息。随着机器人的运动,屏幕上的位置信息不断地动态更新。屏幕上的位置信息只是用来显示的,不能修改。
如何查看机器人的位置状态呢?
【操作步骤】:
1.按下【POSN】 键。
2.选择适当的坐标系:
(1)按 F2 【JNT】,将看到如下的类似屏幕:
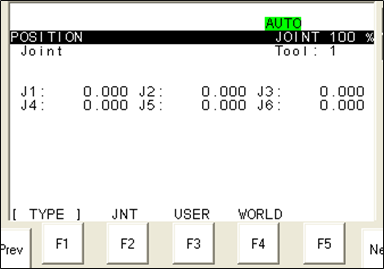
其中,Tool表示当前使用的工具坐标号;
(2)按F3 【USER】,将看到如下的类似屏幕:
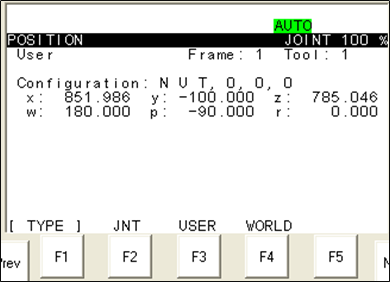
其中,Tool表示当前使用的工具坐标号;Frame表示当前使用的用户坐标系号。
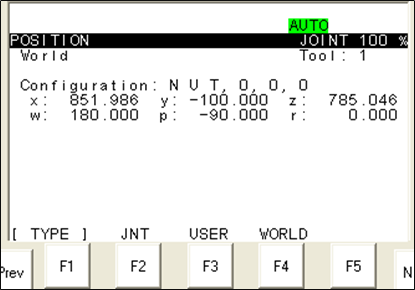
(3)按F4 【WORLD】,将看到如下的类似屏幕