
1、为什么需要零点复归?
零点复归机器人时需要将机器人的机械信息与位置信息(软件0位)同步,来定义机器人的物理位置。必须正确操作机器人来进行零点复归。通常在机器人从FANUC Robotics出厂之前已经进行了零点复归。但是,机器人还是有可能丢失零点数据,需要重新进行零点复归。
2、哪些情况下需要做零点复归?
因为Mastering的数据出厂时就设置好了,所以,在正常情况下,没有必要做Masteing,但是只要发生以下情况之一,就必须执行Mastering。
l机器人执行一个初始化启动;
l SRAM(CMOS)的备份电池的电压下降导致Mastering数据丢失;
l SPC的备份电池的电压下降导致SPC脉冲记数丢失;
l 在关机状态下卸下机器人底座电池盒盖子;
l更换马达;
l机器人的机械部分因为撞击导致脉冲记数不能指示轴的角度;(不匹配)
l编码器电源线断开;
l 更换SPC; 机械拆卸 。
3、零点复归的方法有哪些?
| Jig mastering (专门夹具核对方式) | 出厂时设置:需卸下机器人上的所有负载,用专门的校正工具完成。 |
| Mastering at the zero-degree positions (零度点核对方式) | 由于机械拆卸或维修导致机器人Mastering数据丢失。需要将六轴同时点动到零度位置,且由于靠肉眼观察零度刻度线,误差相对大一点。 |
| Single axis mastering (单轴核对方式) | 由于单个坐标轴的机械拆卸或维修(通常是更换马达引起)。 |
| Quick mastering (快速核对方式) | 由于电气或软件问题导致丢失Mastering数据,恢复已经存入的Mastering数据作为快速示教调试基准。若由于机械拆卸或维修导致机器人Mastering数据丢失,则不能采取此法。 条件:在机器人正常时设置Mastering data。 |
4、零度点核对方式的步骤:
1、进入Master/Cal(零度点调整)界面,(画面2);
依次按键操作:【MENU】(菜单)- 0 【NEXT】(下个)- 【System】(系统设定)- F1 【Type】(类型)- 【Master/Cal】(零度点调整)
2、示教机器人的每根轴到0度位置,如画面1的姿态;
3、选择2 【ZERO POSITION MASTER】(零度点核对方式),按【ENTER】 (回车)键确认,显示画面2;
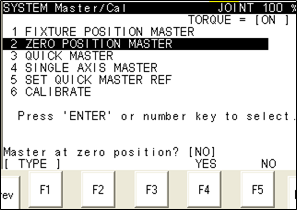
4.按F4 【YES】(是)确认;
5.选6 【CALIBRATE】(校准),按 【ENTER】 (回车)键确认,显示画面3;
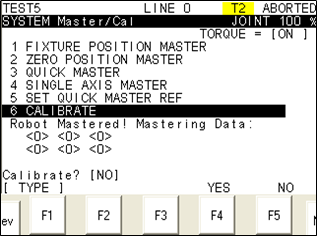
6.按 F4 【YES】(是)确认,显示画面4:
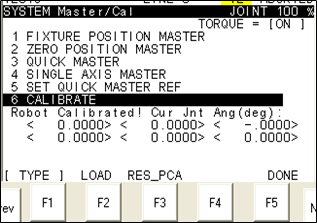
7.按 F5【 DONE 】(完成)隐藏Master/Cal(零度点调整)界面,即可。

