
控制理论的发展
上一节
下一节
1.2 控制理论的发展
1.2.1 控制理论的发展
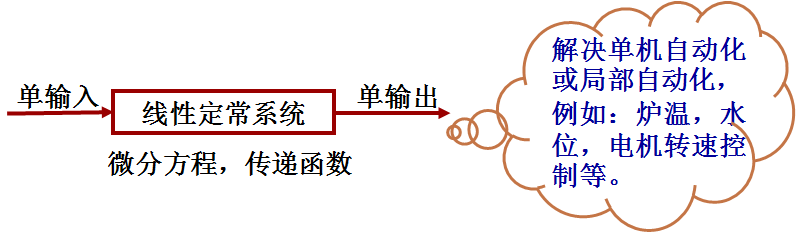
1.经典控制理论 ( 20世纪40年代 )
主要研究单输入、单输出的线性系统的自动控制问题。采用的数学模型通常为微分方程和传递函数。
代表人物和事件:
1948年,美国麻省理工学院(MIT)数学家诺伯特.维纳(N.Wiener)发表了专著:《控制论》(Cybernetics)―关于在动物和机器中控制与通讯的科学。标志着控制理论的诞生。
1954年,我国2院院士,航天之父,科学家钱学森在美国发表了专著:《工程控制论》(EngineeringCybernetics),推动了控制理论在工程领域的应用。
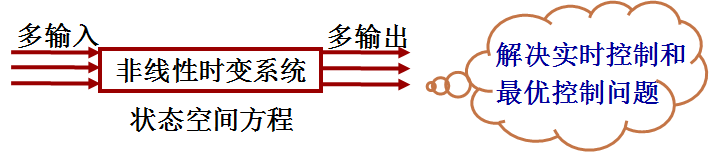
2.现代控制理论 ( 20世纪60年代 )
主要研究多输入、多输出的线性或非线性系统的最优控制问题。采用的数学模型通常为状态空间方程。
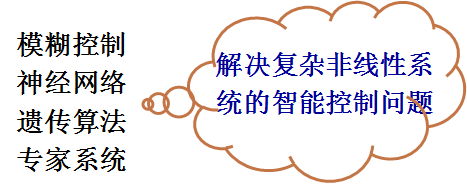
3.智能控制理论 ( 20世纪70年代 )
1.2.2 机械控制理论的研究对象和任务
1、机械工程控制论的研究对象
机械工程技术中广义系统的动力学问题。研究系统及其输入、输出三者之间的动态关系。

2、机械工程控制论的任务
系统分析:已知输入和系统,求输出
最优控制:已知系统和输出,求输入
系统辨识:已知输入和输出,求系统参数
思考题:
经典控制理论与现代控制理论研究的内容有何不同?

