
对控制系统的基本要求
上一节
1.5 对控制系统的基本要求
对控制系统的基本要求:稳定性(稳) 、准确性(准) 、快速性(快)
“稳”与“快”是说明系统动态(过渡过程)品质。
“准”是说明系统的稳态(静态)品质。
1.稳定性
是保证控制系统正常工作的首要条件。线性控制系统的稳定性由系统本身的结构与参数所决定的,与外部条件和初始状态无关。若系统参数匹配不当可能引起振荡。
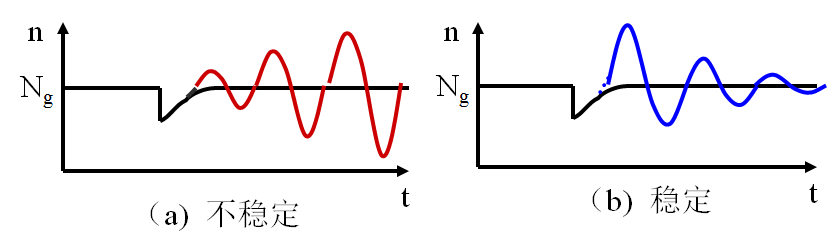 图1.5-1 系统响应的稳定与不稳定状态
图1.5-1 系统响应的稳定与不稳定状态
2.准确性
是指控制系统的控制精度,一般用稳态误差来衡量。所谓稳态误差是指以一定变化的输入信号作用于系统后,系统对抗干扰重新获得平衡状态时,输出量的实际值与期望值之间的误差。
稳态精度与控制系统的结构、参数及输入信号形式有关。
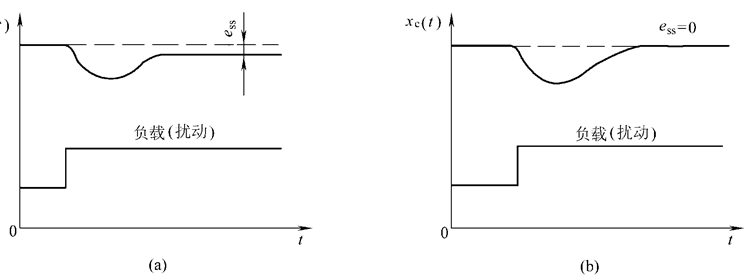
图1.5-2 稳态误差对准确性的表达
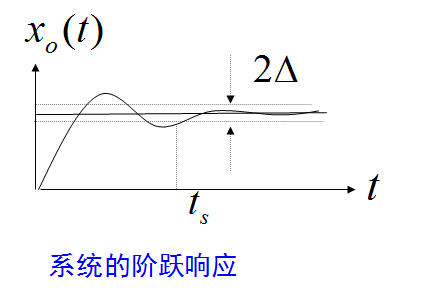
3.快速性
是指当系统的输出量与输入量之间产生偏差时,系统消除这种偏差的快慢程度。用超调量、动态响应时间等指标来衡量。
快速性好的系统,消除偏差的过渡过程时间短,因而能复现快速变化的输入信号,并具有较好的动态性能。
对控制系统的基本要求一般由设计要求的性能指标反映。
例如:
设计一个液位控制器
要求时间响应<1s,稳态误差<5%,最大超调量<10%。
本章总结:
1.了解控制理论的发展;
2.掌握系统的分类及反馈的概念;
3.掌握闭环控制系统的工作原理;
4.掌握闭环控制系统的组成及涉及的参数概念;
5.掌握对控制系统的基本要求。
思考题:
简述对控制系统的基本要求。

