
2.1智能传感器
传感器可理解为模拟人类的五感(视觉、味觉、听觉、嗅觉、触觉)去感知物理世界的一种物理装置。 维基百科对传感器的定义为:传感器(Sensor,有时也称为Transducer-换能器)是能感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置。
在作为自动化智能设备的关键部件,传感器可谓是发展智能制造的基础和核心。它广泛应用于社会发展及人类生活的各个领域,尤其在机械设备制造、科学仪器仪表、医疗卫生、通信电子等领域,传感器更是得到了普遍运用。当下,传感器正向微型化、多功能化、数字化、智能化、系统化和网络化方向发展,市场应用呈爆发式增长态势。毫无疑问,智能传感器将成为工业互联网、物联网、工业大数据甚至人工智能发展的核心器件之一。
2.1.1工业自动化中常用的传感器
传感器一般由敏感元件、转换元件、变换电路和辅助电源四部分组成,如图下图所示。

敏感元件直接感受被测量,并输出与被测量有确定关系的物理量信号;转换元件将敏感元件输出的物理量信号转换为电信号;变换电路负责对转换元件输出的电信号进行放大调制;转换元件和变换电路一般还需要辅助电源供电。也就是说敏感元件负责测量,转换元件负责翻译,变换电路负责过滤和放大信号,让信号输出符合要求。
传感器分类
根据传感器工作原理,可分为物理类(基于力、热、光、电、磁和声等物理效应)、化学类(基于化学反应的原理)、生物类(基于酶、抗体、和激素等分子识别功能)三大类。
根据感知功能可分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。
对应人类的五感,传感器可进行如下分类:
光敏传感器---对应人的视觉
声敏传感器---对应人的听觉
气敏传感器---对应人的嗅觉
化学传感器---对应人的味觉
压敏、温敏、流体传感器---对应人的触觉
按输入信息分类,传感器又可以分类下表情况
| 基本测量 | 派生测量 | |
| 位移 | 线位移 | 长度、厚度、应变、振动、磨损、不平度 |
| 角位移 | 旋转角、偏转角、角振动 | |
| 速度 | 线速度 | 速度、振动、流量、动量 |
| 角速度 | 转速、角振动 | |
| 加速度 | 线加速度 | 振动、冲击、质量 |
| 力 | 压力 | 重力、应力 |
| 温度 | ||
| 光 | ||
2.工业自动化常见的传感器
工业自动生产线中的传感器是设备中不可或缺的一种器件,它是设备的机械系统和控制系统连结的纽带。生产线设备系统通过传感器将运动参数以及运行状态反馈给控制系统,控制系统通过传感器反馈的信号和数据发出指令驱动机械系统,其重要性不言而喻。传感器相当于人体的各种感觉器官,设备控制系统需要通过它来确定:机构的位置、产品的有无、以及产品的精度等重要参数以监测和控制设备的使用状态和产品的生产过程。
根据其使用方式,传感器在生产线设备中最常见的主要用途有以下几种:检测有无、检测位置、检测外形、检测速度、检测温度等各种物理量。根据其检测方式,工业自动化设备中常用的传感器大约有以下几种:磁性开关、接近开关、光电开关、光纤传感器、光栅、加速度传感器、位移传感器、压力传感器、电热偶、激光传感器、编码器等。
1)磁性传感器
气缸用传感器的一个专用称呼,主要应用于检测气缸活塞位置。通常,都由气缸供应商根据客户使用情况配套提供。顾名思义,磁性开关是通过电磁感应来检测目标物,所以,其检测精度相当低。下图画红圈的就是气缸中用的磁性传感器。

2)接近开关
接近开关(Proximity Switch)是一种可以检测到附近有物体与之接近的传感器,在工业现场使用很普遍。顾名思义,作为一种开关(Switch),它能输出0或者1两种结果。
根据工作原理的不同,接近开关可以分为感应式(Inductive)和光电式(主要是红外线,Infrared)两种。先来认识下感应式接近开关的样子。

感应式接近开关在接触铁质金属和不含铁的金属时的工作原理有所不同。感应式接近开关通过其内部振荡电路在其前表面产生一个高频磁场。当有铁质金属接近它时,铁质金属很容易被磁化,磁化的过程会吸收高频磁场的能量。
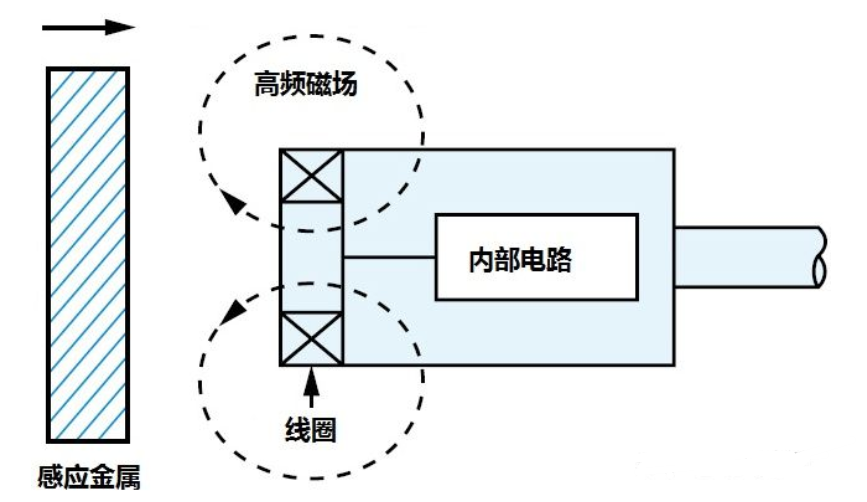
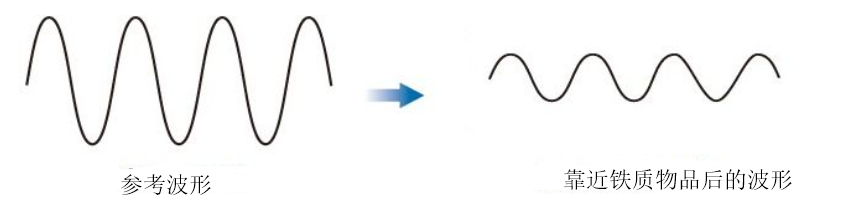
随着铁质金属与接近开关的靠近,金属被磁化的程度越高,高频磁场的能量被吸收的就越多。这导致接近开关内部振荡电路的负载越来越大,最后振荡电路发生衰减或者停止。接近开关内部的检测电路可以检测振荡电路状态的变化,从而改变输出状态,将接近开关的信号值从0变为1。振荡电路的波形在接触铁质金属前后可以参下面这张图:
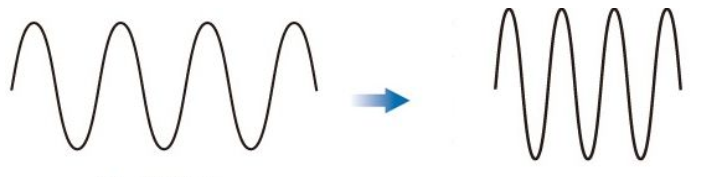
当不含铁的金属(比如:铝、铜等)靠近感应式接近开关时,它们不吸收高频磁场的能量。相反,这类金属还能使接近开关内部振荡电路的频率增大。内部的检测电路同样能检测到这种变化,从而改变输出状态,将接近开关的信号值从0变为1。振荡电路的波形在接触不含铁金属前后可以参下面这张图:
3)光电开关
光电传感器是通过把光强度的变化转换成电信号的变化来实现控制的。光电传感器在一般情况下,有三部分构成,它们分为:发送器、接收器和检测电路。发送器对准目标发射光束,发射的光束一般来源于半导体光源,发光二极管(LED)、激光二极管及红外发射二极管。光束不间断地发射,或者改变脉冲宽度。接收 器有光电二极管、光电三极管、光电池组成。在接收器的前面,装有光学元件如透镜和光圈等。在其后面是检测电路,它能滤出有效信号和应用该信号。
光电传感器的安装实例:
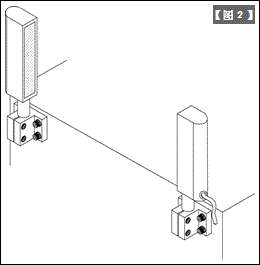
对射式光电传感器安装实例
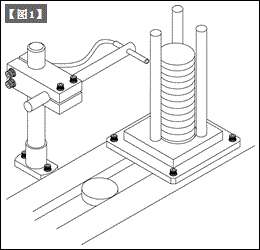
光纤式光电传感器在储料器中检测零件的实例
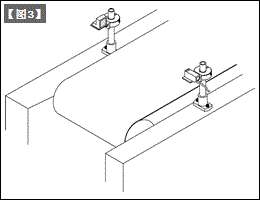
是输送机工件检测实例
4)位移传感器
位移传感器又称为线性传感器,是一种属于金属感应的线性器件,位移传感器的作用是把各种被测物理量转换为电量。根据位移量的大小输出大小不同的电信号,然后能判断位移量的大小,并且位移传感器的应用范围相当广泛。
1、激光位移传感器的应用
激光传感器常用于长度、距离、振动、速度、方位等物理量的测量。
2、磁致伸缩位移传感器的应用
注塑机、压铸机、吹瓶机、液压机、鞋机、橡胶机、轮胎硫化机、压延机、五金机械(监控模具厚度变化和平衡)、钢厂轧辊调节、盾构机、液压伺服系统、液位检测和控制。
3、直线位移传感器(电子尺)的应用领域
注塑机、压铸机、吹瓶机、液压机、鞋机、砖机、砌垛机、陶瓷机械、列车轨距监测、橡胶机、轮胎硫化机、压延机、五金机械(监控模具厚度变化和平衡)、皮革机械、比例阀、长行程钻管机、弹簧机械、木工机械、板材设备、印刷机械(刷辊运动、裁纸等)、钢厂轧辊调节、机械手、自动门(列车及大厅)、裁床(裁钢管、木板、线材等)、桥梁监测、煤炭设备(掘进机、坑道支架、塌方监测等)、地质监测(如:塌方、溃堤)。
4、拉绳/拉线位移传感器的应用领域
舞台屏幕设备、皮革机械、盾构机、长行程钻管机、弹簧机械、木工机械、板材设备、印刷机械(刷辊运动、裁纸等)、机械手、自动门(列车及大厅)、裁床(裁钢管、木板、线材等)、桥梁监测、电梯平层、升降机、水闸开度、水库水位、行车、工程车、龙门吊、港口设备、煤炭设备(掘进机、坑道支架、塌方监测等)、水处理液位、仓储设备、地质监测(如:塌方、溃堤)、石油钻探设备、探矿设备等。
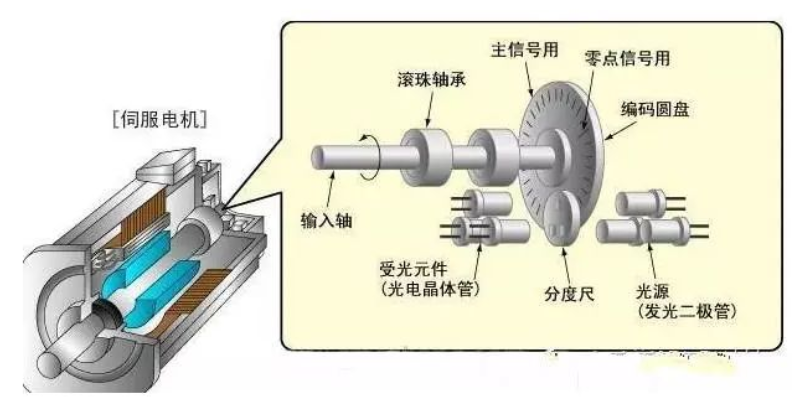
5)编码器
编码器,英文名称“encoder”,它是一种能把距离(直线位移)和角度(角位移)转换成电信号并输出的传感器。它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器, 这些脉冲能用来控制角位移, 如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。编码器产生电信号后由数控制置 CNC 、可编程逻辑控制器PLC、控制系统等来处理。这些传感器主要应用在下列方面:机床、材料加工、 电动机反馈系统以及测量和控制设备。在 ELTRA编码器中角位移的转换采用了光电扫描原理。读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。此系统全部用一个红外光源垂直照射, 这样光就把盘子上的图像投射到接收器表面上, 该接收器覆盖着一层光栅, 称为准直仪,它具有和光盘相同的窗口。接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。一般地,旋转编码器也能得到一个速度信号, 这个信号要反馈给变频器, 从而调节变频器的输出数据。
5)加速度传感器
加速度传感器是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。根据传感器敏感元件的不同,常见的加速度传感器包括电容式、电感式、应变式、压阻式、压电式等。在工业自动化中间利用加速度传感器来检测设备的振动、位移,观察设备的工况,来达到监控设备状态。
6)视觉识别传感器
视觉传感器是指通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。视觉传感器是整个机器视觉系统信息的直接来源,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助设备。视觉传感器的主要功能是获取足够的机器视觉系统要处理的最原始图像。
我们可以提前设置视觉传感器应该获取什么样的图像,视觉传感器在获取图像后就会将图像与设置要求进行对比,满足要求的保存下来,不满足要求的图像就会被忽略,视觉传感器的图像清晰度也是以像素来衡量的,目前,视觉传感器的像素能够达到130万,因此,无论距离多远,它都能获取清晰的图像。
视觉识别在分检、检测、计量、测量、定向等多个领域应用广泛,节省劳动力,提高工作效率上面发挥巨大作用。
在生产车间的包装作业部分经常使用到视觉传感器,视觉传感器在这里的作用主要是检查包装标签粘贴的位置是否正确,包装内产品的数量是否满足要求,或者是包装物是否存在损坏、变质的问题等等,在汽车组装业,视觉传感器也发挥了重要作用,它可以检测汽车各个部位是否完好,组装是否正确,关键部位是否安全可靠等,在装瓶也,视觉传感器能够检测瓶盖是否盖好、盖紧,瓶内是否进入杂质等,无论在那个行业,视觉传感器都大大节省了人力,提高了工作效率。
7)力传感器
力传感器(force sensor) 将力的量值转换为相关电信号的器件。力是引起物质运动变化的直接原因。力传感器能检测张力、拉力、压力、重量、扭矩、内应力和应变等力学量。具体的器件有金属应变片、压力传感器等,在动力设备、工程机械、各类工作母机和工业自动化系统中,成为不可缺少的核心部件。
案例:测量力传感器——机内在线测量传感器
工件检测系统(即测头)对于工件加工前:可实现工装夹具和零件的装夹找正、零件编程原点的设定;对于加工过程中:首件抽检、工序间重点尺寸的检测及加工结果的最终检测等。早期完成这些检测工作的主要手段有人为手工测量及三坐标测量机的最终检测;随着近几年测头产品不断被企业所认可,工件检测系统(即测头产品)已成为数控机床不可缺少的组成部分。在线检测系统优点是:能够保证批量加工工件的一致性,扩展数控机床功能,解决早期常规测量无法解决的问题,同时改善数控机床性能,提高数控机床效率。
在线测量的测头就利用了力传感器来实现检测。
案例:机器人中用到的传感器
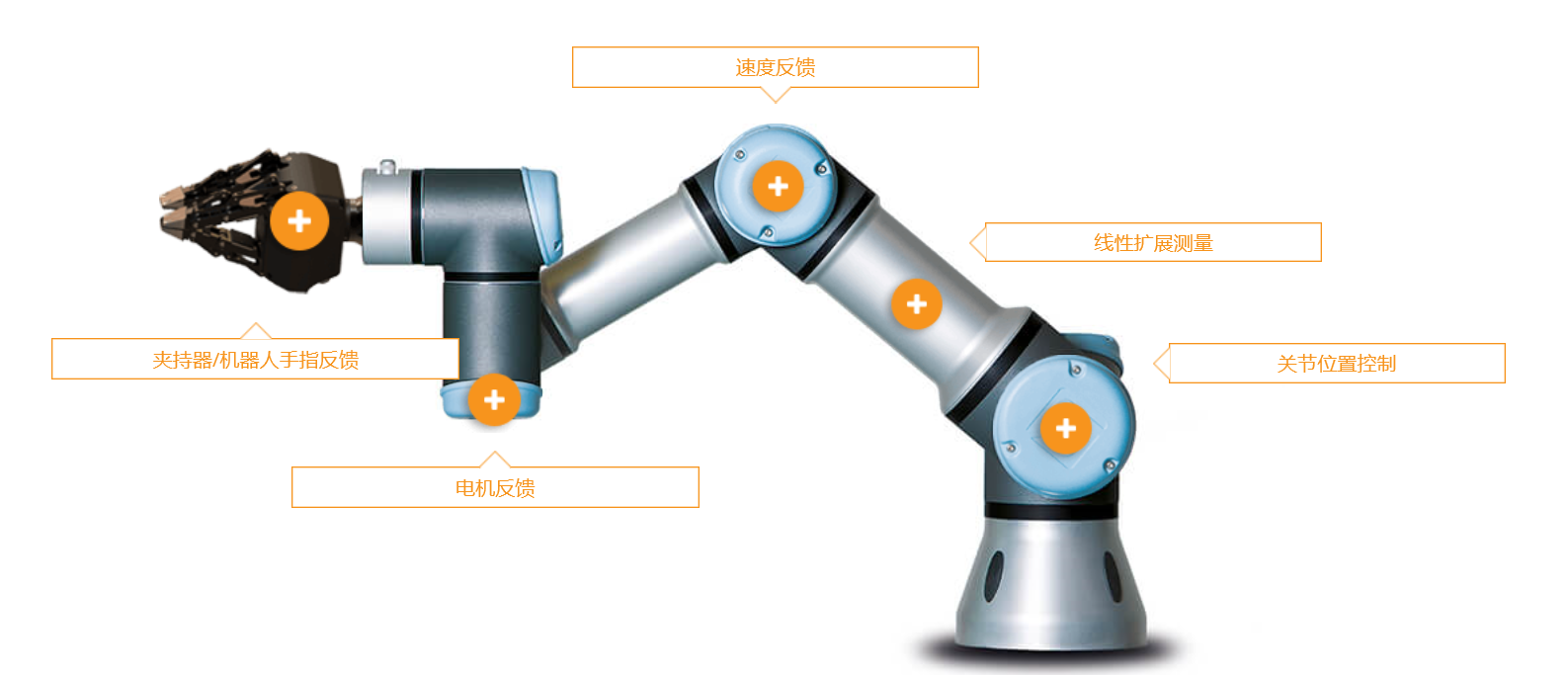
视觉传感器:给机器人眼睛;可以检测物体,识别物体形状,确定移动位置。在零件拾取应用中,(假设没有视觉系统),无法知道机器人抓手是否正确抓取了零件。而零件检测应用可以为你提供抓手位置的反馈。例如,如果抓手漏掉了一个零件,系统会检测到这个错误,并重复操作一次,以确保零件被正确抓取。
力/力矩传感器:给机器人带去了触觉。机器人利用力/力矩传感器感知末端执行器的力度。多数情况下,力/力矩传感器都位于机器人和夹具之间,这样,所有反馈到夹具上的力就都在机器人的监控之中。有了力/力矩传感器,像装配,人工引导、示教,力度限制等应用才能得以实现。
利用力觉传感器原理设计出机器人碰撞检测传感器,这种传感器有各种不同的形式。这些传感器的主要应用是为作业人员提供一个安全的工作环境,协作机器人最有必要使用它们。一些传感器可以是某种触觉识别系统,通过柔软的表面感知压力,如果感知到压力,将给机器人发送信号,限制或停止机器人的运动。
绝对编码器:在机器人电机上安装绝对编码器能获得关节位置、移动的速度。
加速度传感器:某些机器人利用加速度计反馈可以在移动过程中感知运动的状态是否平稳。,还有些则使用电流反馈。在这两种情况下,当机器人感知到异常的力度时,触发紧急停止,从而确保安全。但是在机器人停止之前,你还是会被它撞到。因此最安全的环境是完全没有碰撞风险的环境,这就是接下来这个传感器的使命。
要想让工业机器人与人进行协作,首先要找出可以保证作业人员安全的方法。这些传感器有各种形式,从摄像头到激光等,目的只有一个,就是告诉机器人周围的状况。有些安全系统可以设置成当有人出现在特定的区域/空间时,机器人会自动减速运行,如果人员继续靠近,机器人则会停止工作。
课后阅读:促进新一代人工智能产业发展三年行动计划(2017-2020)

