什么是动态规划
https://www.zhihu.com/question/410196236/answer/2317284424
用一句话解释动态规划就是 “记住你之前做过的事”,如果更准确些,其实是 “记住你之前得到的答案”。
我举个大家工作中经常遇到的例子。
在软件开发中,大家经常会遇到一些系统配置的问题,配置不对,系统就会报错,这个时候一般都会去 Google 或者是查阅相关的文档,花了一定的时间将配置修改好。
过了一段时间,去到另一个系统,遇到类似的问题,这个时候已经记不清之前修改过的配置文件长什么样,这个时候有两种方案,一种方案还是去 Google 或者查阅文档,另一种方案是借鉴之前修改过的配置,第一种做法其实是万金油,因为你遇到的任何问题其实都可以去 Google,去查阅相关文件找答案,但是这会花费一定的时间,相比之下,第二种方案肯定会更加地节约时间,但是这个方案是有条件的,条件如下:
之前的问题和当前的问题有着关联性,换句话说,之前问题得到的答案可以帮助解决当前问题
需要记录之前问题的答案
当然在这个例子中,可以看到的是,上面这两个条件均满足,大可去到之前配置过的文件中,将配置拷贝过来,然后做些细微的调整即可解决当前问题,节约了大量的时间。
不知道你是否从这些描述中发现,对于一个动态规划问题,我们只需要从两个方面考虑,那就是 找出问题之间的联系,以及 记录答案,这里的难点其实是找出问题之间的联系,记录答案只是顺带的事情,利用一些简单的数据结构就可以做到。
思考动态规划问题的四个步骤
一般解决动态规划问题,分为四个步骤,分别是
问题拆解,找到问题之间的具体联系
状态定义
递推方程推导
实现
这里面的重点其实是前两个,如果前两个步骤顺利完成,后面的递推方程推导和代码实现会变得非常简单。
1 动态规划要素
动态规划有三要素:阶段、状态和决策。
阶段:
把一个问题的过程,恰当地分为若干个相互联系的阶段,以便于按一定的次序去求解。描述阶段的变量称为阶段变量。阶段的划分,一般是根据时间和空间的自然特征来进行的,但要便于问题转化为多阶段决策。
状态:
表示每个阶段开始所处的自然状况或客观条件。通常一个阶段有若干个状态(也可能只有一个状态),描述过程状态的变量称为状态变量。
决策:
表示当过程处于某一阶段的某个状态时,可以作出不同的决定,从而确定下一阶段的状态,这种决定称为决策。
一般流程:
划分阶段 -> 正确选择状态变量 -> 确定状态转移方程
-> 确定阶段指标函数和最优指标函数,建立动态规划基本方程。
2 动态规划的适用范围
动态规划用于解决多阶段决策最优化问题,但也不是所有最优化问题都可以用动态规划来解答。用动态规划的最优化问题要满足两个条件:
a) 最优子结构(最优化原理)
作为整个过程的最优策略具有这样的性质:无论过去的状态和决策如何,相对于前面的决策所形成的状态而言,余下的决策序列必然构成最优子策略。”也就是说,一个最优策略的子策略也是最优的。
b) 无后效性
如果某阶段状态给定后,则在这个阶段以后过程的发展不受这个阶段以前各段状态的影响。就是说在状态i求解时用到状态j,状态j求解用到状态k...,状态N。而状态N要用到状态i,这样的求解过程形成了环就没法用动态规划解答。也就是说当前状态是前面状态的完美总结,现在与过去无关。有的问题换一个划分状态或阶段的方法就满足无后效性,这样的问题仍然可以用动态规划解。
如果状态变量不能满足无后效性的要求,应适当地改变状态的定义或规定方法。
3 动态规划解决问题的一般思路
拿到多阶段决策最优化问题后,第一步要判断这个问题是否可以用动态规划解决,如果不能就要考虑搜索或者贪心了。当确定问题可以用动态规划后,可以用下面介绍的方法解决问题:
a) 模型匹配法
这个是最先考虑的。主要是看看问题是不是自己熟悉的某个基本的模型,如背包模型等,是的话就直接套用了,当然要注意其中的变动。有很多考题是基本模型的变型,小心条件。这些基本的模型将在下面的分类中以算法题的形式一一介绍。
b) 三要素法
仔细分析问题尝试着确定动态规划的三要素,不同的问题的确定方形不同:
先确定阶段的问题:数塔问题和走路问题。
先确定状态的问题:大多数都是先确定状态。
先确定决策问题:背包问题。
一般都是先从比较明显的地方入手,至于怎么知道哪个明显就看经验,多做题就会发现。
c) 寻找规律法
耐心分析几组数据,找找有没有什么规律。
d) 边界条件法
找到问题的边界条件,然后考虑边界条件与它邻接状态之间的关系。
题目实战
但凡涉及到动态规划的题目都离不开一道例题:爬楼梯。
题目描述
假设你正在爬楼梯。需要 n 阶你才能到达楼顶。
每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到楼顶呢?
注意:给定 n 是一个正整数。
示例 1:
输入:2
输出:2
解释: 有两种方法可以爬到楼顶。
1. 1 阶 + 1 阶
2. 2 阶
示例 2:
输入:3
输出:3
解释: 有三种方法可以爬到楼顶。
1. 1 阶 + 1 阶 + 1 阶
2. 1 阶 + 2 阶
3. 2 阶 + 1 阶
题目解析
爬楼梯,可以爬一步也可以爬两步,问有多少种不同的方式到达终点,我们按照上面提到的四个步骤进行分析:
问题拆解:
我们到达第 n 个楼梯可以从第 n - 1 个楼梯和第 n - 2 个楼梯到达,因此第 n 个问题可以拆解成第 n - 1 个问题和第 n - 2 个问题,第 n - 1 个问题和第 n - 2 个问题又可以继续往下拆,直到第 0 个问题,也就是第 0 个楼梯 (起点)
状态定义
“问题拆解” 中已经提到了,第 n 个楼梯会和第 n - 1 和第 n - 2 个楼梯有关联,那么具体的联系是什么呢?你可以这样思考,第 n - 1 个问题里面的答案其实是从起点到达第 n - 1 个楼梯的路径总数,n - 2 同理,从第 n - 1 个楼梯可以到达第 n 个楼梯,从第 n - 2 也可以,并且路径没有重复,因此我们可以把第 i 个状态定义为 “从起点到达第 i 个楼梯的路径总数”,状态之间的联系其实是相加的关系。
递推方程
“状态定义” 中我们已经定义好了状态,也知道第 i 个状态可以由第 i - 1 个状态和第 i - 2 个状态通过相加得到,因此递推方程就出来了
dp[i] = dp[i - 1] + dp[i - 2]实现
你其实可以从递推方程看到,我们需要有一个初始值来方便我们计算,起始位置不需要移动
dp[0] = 0,第 1 层楼梯只能从起始位置到达,因此dp[1] = 1,第 2 层楼梯可以从起始位置和第 1 层楼梯到达,因此dp[2] = 2,有了这些初始值,后面就可以通过这几个初始值进行递推得到。
参考代码
public int climbStairs(int n) {
if (n == 1) {
return 1;
}
int[] dp = new int[n + 1]; // 多开一位,考虑起始位置
dp[0] = 0; dp[1] = 1; dp[2] = 2;
for (int i = 3; i <= n; ++i) {
dp[i] = dp[i - 1] + dp[i - 2];
}
return dp[n];
}实验要求:请使用MATLAB编程实现n=20的爬楼梯问题的解,并输出所有解。
==================================
如何学好动态规划
链接:https://www.zhihu.com/question/291280715/answer/1916669734


大家都知道算法里的桂冠是动态规划,无论是学习还是面试,动态规划都是最重要的。
其实去网上搜一搜也可以发现,能把动态规划讲清楚的资料挺少的,因为动规确实很难!要给别人讲清楚更难!
《剑指offer》上 动规的题目很少,经典的算法书籍《算法4》 没有讲 动规,而《算法导论》讲的动规基本属于劝退级别的。
那么如何学好动态规划呢?
我来按照如下四点,来回答这个问题
动态规划的解题步骤
动态规划应该如何debug
关于动态规划的疑惑
如何刷题动态规划
动态规划的解题步骤
做动规题目的时候,很多同学会陷入一个误区,就是以为把状态转移公式背下来,照葫芦画瓢改改,就开始写代码,甚至把题目AC之后,都不太清楚dp[i]表示的是什么。
这就是一种朦胧的状态,然后就把题给过了,遇到稍稍难一点的,可能直接就不会了,然后看题解,然后继续照葫芦画瓢陷入这种恶性循环中。
状态转移公式(递推公式)是很重要,但动规不仅仅只有递推公式。
对于动态规划问题,我将拆解为如下五步曲,这五步都搞清楚了,才能说把动态规划真的掌握了!
确定dp数组(dp table)以及下标的含义
确定递推公式
dp数组如何初始化
确定遍历顺序
举例推导dp数组
一些同学可能想为什么要先确定递推公式,然后在考虑初始化呢?
因为一些情况是递推公式决定了dp数组要如何初始化!
后面的讲解中我都是围绕着这五点来进行讲解。
可能刷过动态规划题目的同学可能都知道递推公式的重要性,感觉确定了递推公式这道题目就解出来了。
其实 确定递推公式 仅仅是解题里的一步而已!
一些同学知道递推公式,但搞不清楚dp数组应该如何初始化,或者正确的遍历顺序,以至于记下来公式,但写的程序怎么改都通过不了。
后序的讲解的大家就会慢慢感受到这五步的重要性了。
动态规划应该如何debug
相信动规的题目,很大部分同学都是这样做的。
看一下题解,感觉看懂了,然后照葫芦画瓢,如果能正好画对了,万事大吉,一旦要是没通过,就怎么改都通过不了,对 dp数组的初始化,递归公式,遍历顺序,处于一种黑盒的理解状态。
写动规题目,代码出问题很正常!
找问题的最好方式就是把dp数组打印出来,看看究竟是不是按照自己思路推导的!
一些同学对于dp的学习是黑盒的状态,就是不清楚dp数组的含义,不懂为什么这么初始化,递推公式背下来了,遍历顺序靠习惯就是这么写的,然后一鼓作气写出代码,如果代码能通过万事大吉,通过不了的话就凭感觉改一改。
这是一个很不好的习惯!
做动规的题目,写代码之前一定要把状态转移在dp数组的上具体情况模拟一遍,心中有数,确定最后推出的是想要的结果。
然后再写代码,如果代码没通过就打印dp数组,看看是不是和自己预先推导的哪里不一样。
如果打印出来和自己预先模拟推导是一样的,那么就是自己的递归公式、初始化或者遍历顺序有问题了。
如果和自己预先模拟推导的不一样,那么就是代码实现细节有问题。
这样才是一个完整的思考过程,而不是一旦代码出问题,就毫无头绪的东改改西改改,最后过不了,或者说是稀里糊涂的过了。
这也是我为什么在动规五步曲里强调推导dp数组的重要性。
举个例子:在「代码随想录」刷题小分队微信群里,一些同学可能代码通过不了,会把代码抛到讨论群里问:我这里代码都已经和题解一模一样了,为什么通过不了呢?
发出这样的问题之前,其实可以自己先思考这三个问题:
这道题目我举例推导状态转移公式了么?
我打印dp数组的日志了么?
打印出来了dp数组和我想的一样么?
如果这灵魂三问自己都做到了,基本上这道题目也就解决了,或者更清晰的知道自己究竟是哪一点不明白,是状态转移不明白,还是实现代码不知道该怎么写,还是不理解遍历dp数组的顺序。
关于动态规划的疑惑
还有不少同学对动规的理解是:递推公式是才是最难最重要的,只要想出递归公式,其他都好办。
其实这么想的同学基本对动规理解的不到位的。
动规五部曲里,哪一部没想清楚,这道题目基本就做不出来,即使做出来了也没有想清楚,而是朦朦胧胧的就把题目过了。
如果想不清楚dp数组的具体含义,递归公式从何谈起,甚至初始化的时候就写错了。
例如动态规划:不同路径还不够,要有障碍! 在这道题目中,初始化才是重头戏
如果看过背包系列,特别是完全背包,那么两层for循环先后顺序绝对可以搞懵很多人,反而递归公式是简单的。
至于推导dp数组的重要性,动规专题里几乎每篇Carl都反复强调,当程序结果不对的时候,一定要自己推导公式,看看和程序打印的日志是否一样。
如何刷题动态规划
先来一份 动态规划刷题大纲:
关于动态规划,在专题第一篇关于动态规划,你该了解这些!就说了动规五部曲,而且强调了五部对解动规题目至关重要!
这是Carl做过一百多道动规题目总结出来的经验结晶啊,如果大家跟着「代码随想哦」刷过动规专题,一定会对这动规五部曲的作用感受极其深刻。
动规五部曲分别为:
确定dp数组(dp table)以及下标的含义
确定递推公式
dp数组如何初始化
确定遍历顺序
举例推导dp数组
动规专题刚开始的时候,讲的题目比较简单,不少同学和我反应:这么简单的题目 讲的复杂了,不用那么多步骤分析,想出递推公式直接就AC这道题目了。
Carl的观点一直都是 简单题是用来 巩固方法论的。 简单题目是可以靠感觉,但后面稍稍难一点的题目,估计感觉就不好使了。
在动规专题讲解中,也充分体现出,这动规五部曲的重要性。
动规刷题详细路线:
动划基础
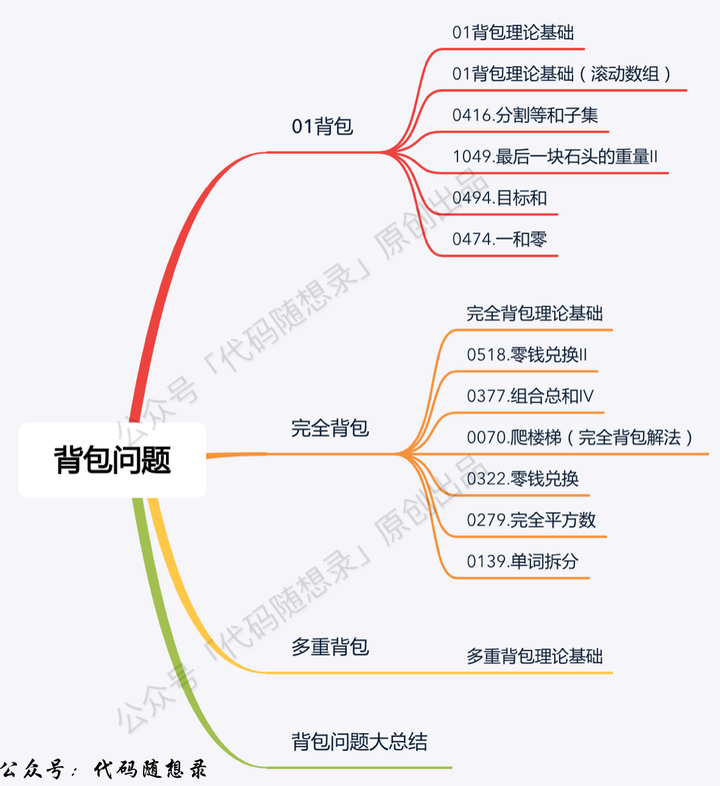
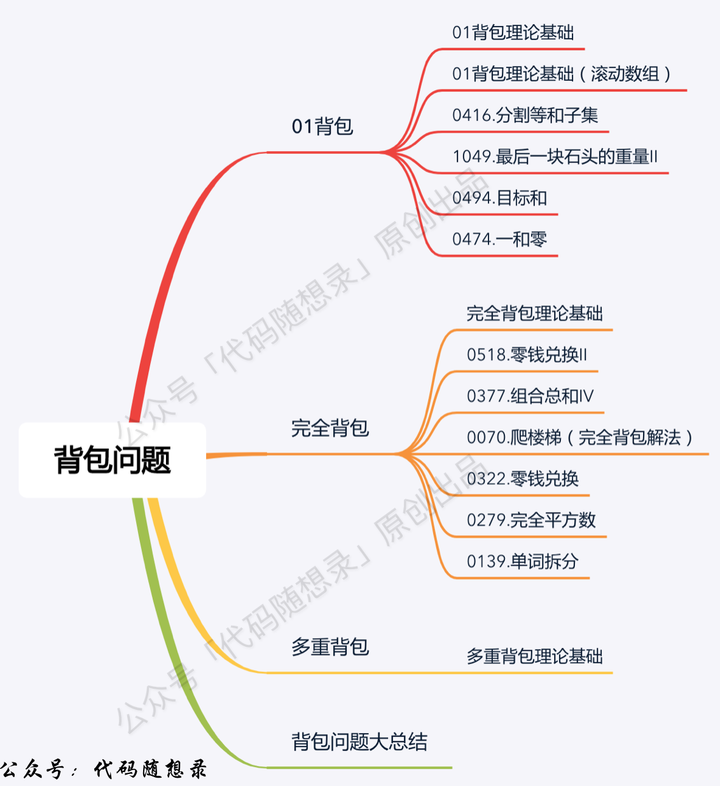
背包问题系列
打家劫舍系列
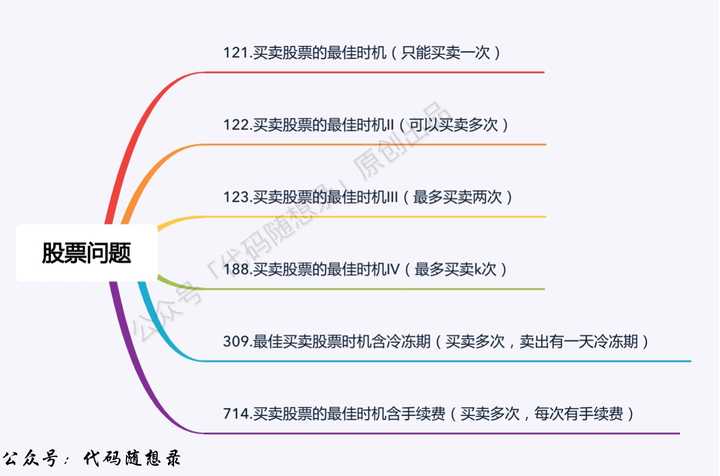
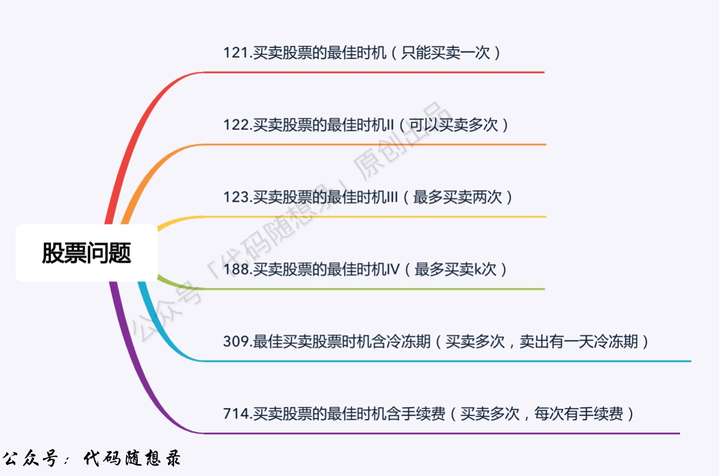
股票系列
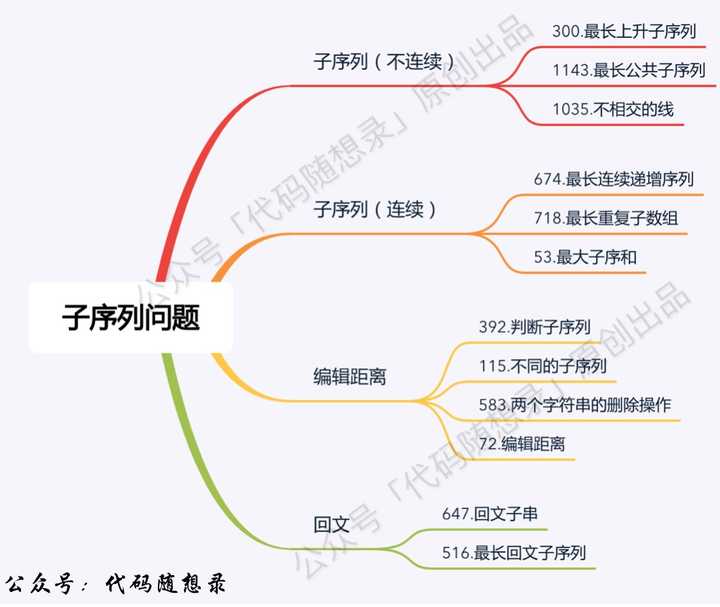
子序列系列

同时我将刷题攻略整理在Github上,瞬间登上了 Github全球热榜,
https://github.com/youngyangyang04/leetcode-master
github 项目截图:
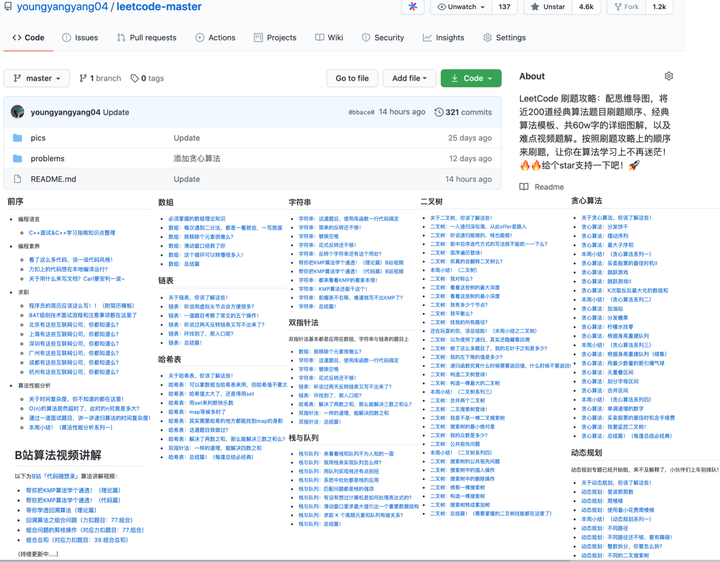
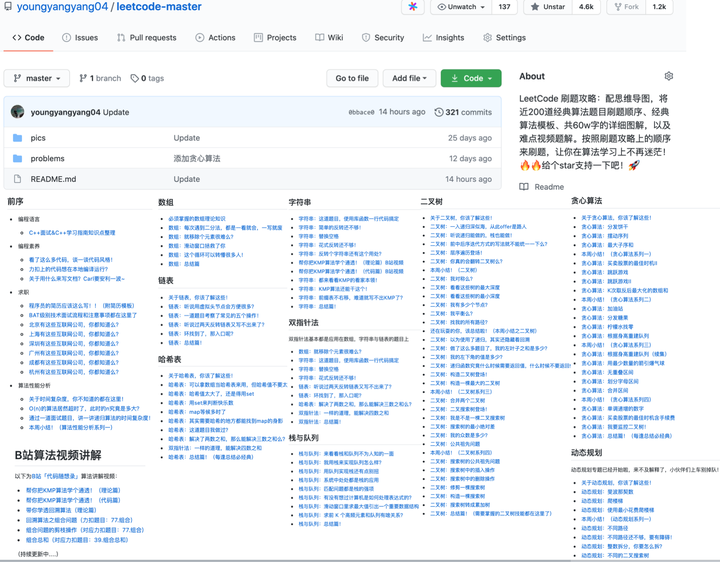
这个项目里面有200道经典算法题目刷题顺序、配有60w字的详细图解,常用算法模板总结,以及难点视频讲解,按照list一道一道刷就可以了!
去看看吧,这个Github算法学习项目会惊艳到你!
youngyangyang04/leetcode-master
可以在B站上关注我,上面有很多算法的讲解视频。
同时也整理出一份PDF,pdf中不仅有刷题大纲、刷题顺序,还有详细图解,每一本pdf发布之后都广受好评先,PDF中攻击20w字详细图解了 100多道力扣上的经典题目,上图:
无论现在要不要学习算法,先去下载吧,你会发现详见很晚!
62.不同路径
题目链接:https://leetcode-cn.com/problems/unique-paths/
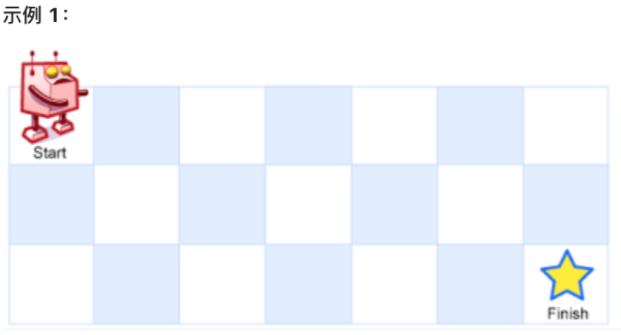
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
示例 1:
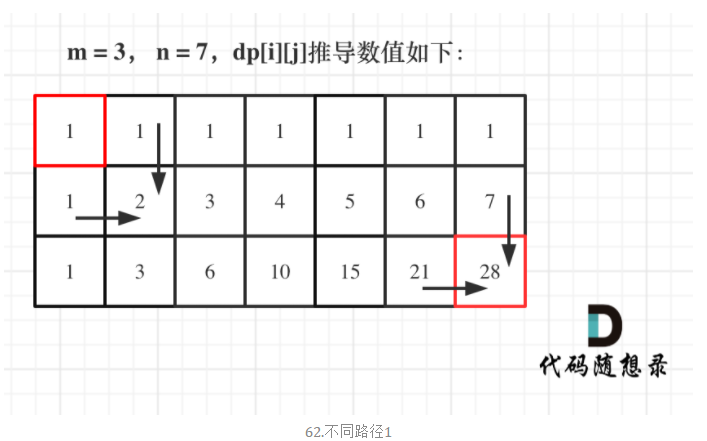
输入:m = 3, n = 7
输出:28
示例 2:
输入:m = 3, n = 2
输出:3
解释:
从左上角开始,总共有 3 条路径可以到达右下角。
向右 -> 向右 -> 向下 向右 -> 向下 -> 向右 向下 -> 向右 -> 向右
示例 3:
输入:m = 7, n = 3
输出:28
示例 4:
输入:m = 3, n = 3
输出:6
提示:
1 <= m, n <= 100 题目数据保证答案小于等于 2 * 10^9
思路
深搜
这道题目,刚一看最直观的想法就是用图论里的深搜,来枚举出来有多少种路径。
注意题目中说机器人每次只能向下或者向右移动一步,那么其实机器人走过的路径可以抽象为一颗二叉树,而叶子节点就是终点!
如图举例:
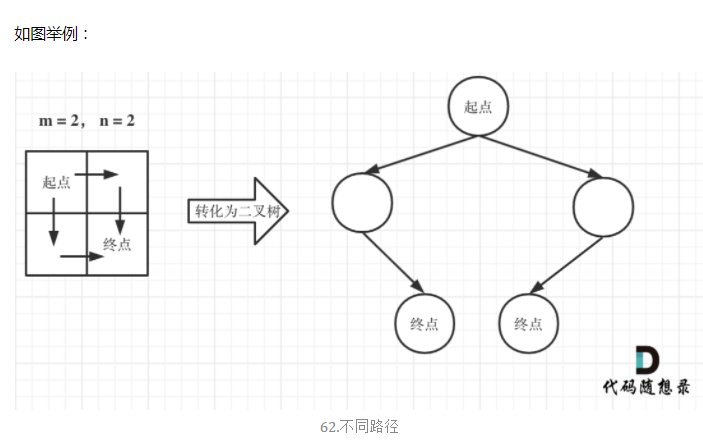
此时问题就可以转化为求二叉树叶子节点的个数,代码如下:
class Solution {
private:
int dfs(int i, int j, int m, int n) {
if (i > m || j > n) return 0; // 越界了
if (i == m && j == n) return 1; // 找到一种方法,相当于找到了叶子节点
return dfs(i + 1, j, m, n) + dfs(i, j + 1, m, n);
}
public:
int uniquePaths(int m, int n) {
return dfs(1, 1, m, n);
}
};
大家如果提交了代码就会发现超时了!
来分析一下时间复杂度,这个深搜的算法,其实就是要遍历整个二叉树。
这颗树的深度其实就是m+n-1(深度按从1开始计算)。
那二叉树的节点个数就是 2^(m + n - 1) - 1。可以理解深搜的算法就是遍历了整个满二叉树(其实没有遍历整个满二叉树,只是近似而已)
所以上面深搜代码的时间复杂度为O(2^(m + n - 1) - 1),可以看出,这是指数级别的时间复杂度,是非常大的。
动态规划
机器人从(0 , 0) 位置出发,到(m - 1, n - 1)终点。
按照动规五部曲来分析:
确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
确定递推公式
想要求dp[i][j],只能有两个方向来推导出来,即dp[i - 1][j] 和 dp[i][j - 1]。
此时在回顾一下 dp[i - 1][j] 表示啥,是从(0, 0)的位置到(i - 1, j)有几条路径,dp[i][j - 1]同理。
那么很自然,dp[i][j] = dp[i - 1][j] + dp[i][j - 1],因为dp[i][j]只有这两个方向过来。
dp数组的初始化
如何初始化呢,首先dp[i][0]一定都是1,因为从(0, 0)的位置到(i, 0)的路径只有一条,那么dp[0][j]也同理。
所以初始化代码为:
for (int i = 0; i < m; i++) dp[i][0] = 1;
for (int j = 0; j < n; j++) dp[0][j] = 1;
确定遍历顺序
这里要看一下递归公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1],dp[i][j]都是从其上方和左方推导而来,那么从左到右一层一层遍历就可以了。
这样就可以保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值的。
举例推导dp数组
如图所示:
以上动规五部曲分析完毕,C++代码如下:
class Solution {
public:
int uniquePaths(int m, int n) {
vector<vector<int>> dp(m, vector<int>(n, 0));
for (int i = 0; i < m; i++) dp[i][0] = 1;
for (int j = 0; j < n; j++) dp[0][j] = 1;
for (int i = 1; i < m; i++) {
for (int j = 1; j < n; j++) {
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m - 1][n - 1];
}
};
时间复杂度:O(m * n) 空间复杂度:O(m * n)
其实用一个一维数组(也可以理解是滚动数组)就可以了,但是不利于理解,可以优化点空间,建议先理解了二维,在理解一维,C++代码如下:
class Solution {
public:
int uniquePaths(int m, int n) {
vector<int> dp(n);
for (int i = 0; i < n; i++) dp[i] = 1;
for (int j = 1; j < m; j++) {
for (int i = 1; i < n; i++) {
dp[i] += dp[i - 1];
}
}
return dp[n - 1];
}
};
时间复杂度:O(m * n) 空间复杂度:O(n)
动态规划:不同路径还不够,要有障碍!
https://mp.weixin.qq.com/s/lhqF0O4le9-wvalptOVOww

