
二、实验内容
1.YL335B生产线输送单元工作流程
YL-335B 型生产线输送单元的主要结构组成如图7-1 所示,其主要功能是:驱动其抓取机械手装置精确定位到供料、加工、装配单元的物料台,在物料台上抓取工件,把抓取到的工件输送到加工、装配、分拣单元的指定地点然后放下。

图7-1 输送单元
2.输送单元的气动回路
输送单元气动控制回路的工作原理如图7-2所示。

图7-2 输送单元气动控制回路工作原理图
3.原点接近开关
原点接近开关是一个无触点的电感式接近传感器,属于金属传感器的一种,用来提供直线运动的起始点信号,如图7-3所示。
原点接近开关共有3个接线端口,其中棕色线接入24V电源,黑色线接入PLC对应的X端口,蓝色线接入电源0V或者公共端COM。
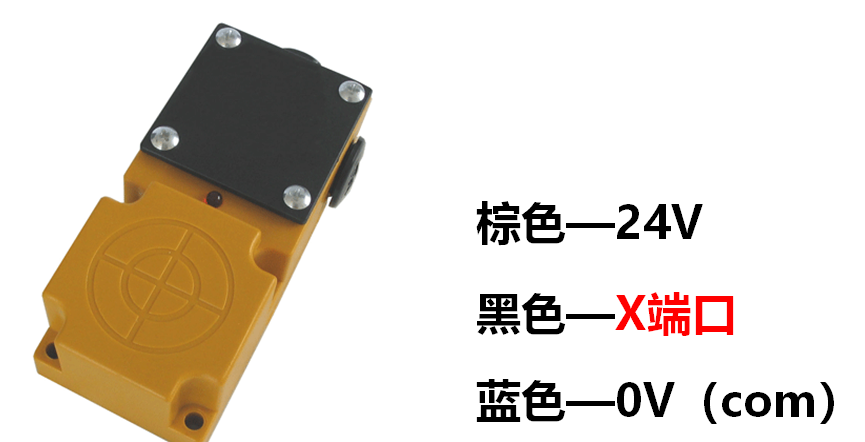
图7-3 原点接近开关
4.限位开关
左、右限位开关均是有触点的微动开关,用来提供越程故障时的保护信号。当机械手在运动中越过左或右极限位置时,限位开关会动作,从而向伺服控制器发出越程故障信号,停止机械手运动,如图7-4所示。
限位开关共有3个接线端口,其中黄色线接入伺服控制器,红色线接入PLC对应的X端口,黑色线接入电源0V或者公共端COM。

图7-4 限位开关
5.伺服控制器
(1)伺服控制器
伺服控制器又称为“伺服驱动器”、“伺服放大器”,是用来控制伺服电机的一种控制器,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。输送单元中采用了松下A5系列的伺服控制器和伺服电机作为机械手直线运动的控制装置,如图7-5所示。

图7-5 伺服控制器和伺服电机
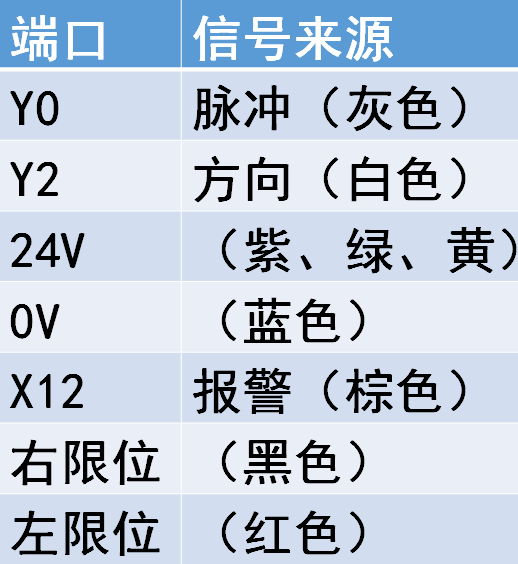
其接线方式如下表所示。
表7-1 伺服控制器接线
(2)编程方法
对输送单元伺服电机的控制主要是定位控制,主要利用了原点回归指令(DZRN)和绝对位置指令(DDRVA)。
①原点回归指令(DZRN)
原点回归指令主要用于初始运行时,让输送单元自动退回到起始位置,搜索和记录原点位置信息,为后面的定位控制提供一个基点,如图7-6所示。

图7-6 原点回归指令编程示例
图中,DZRN表示原点回归指令,K20000表示原点回归开始运动速度,K2000表示爬行速度,X0表示接近点信号输入,Y0表示指定脉冲输出端口。当指令执行完成后,M8029自动接通,进入到下一步。
②绝对位置指令(DDRVA)
进行定位控制时,直接指定目标位置对于原点的坐标量(以带符号的脉冲数表示),用绝对位置指令(DDRVA)实现,如图7-7所示。

图7-7 绝对位置指令编程示例
图中,DDRVA表示绝对位置指令,K3000表示目标位置对于原点的坐标量,K12000表示移动速度,Y0表示指定脉冲输出端口,Y2表示指定方向信号输出端口。当指令执行完成后,M8029自动接通,进入到下一步。
四个工作单元的位置脉冲大致如下。


