
-
1 教学内容
-
2 课件
-
3 教案
-
4 视频
-
5 作业
自学任务
电子教材
固定翼无人机中心测量方法和表示方法
无人机由多个部件组成,包括:机翼,机身、尾翼、发动机,燃料、起落架、机内设备等。每个部件都有重量,飞机的总重量便是所有单个部件重量的总和。重量实际上分布在整个飞机上,在研究无人机的空气动力性能时,需要把无人机的总重量看做一个点,这个点就是重心,重心就是各部件的合力的作用点。
重心影响飞机的稳定性。为确保飞机安全飞行,计算无人机的重心是非常重要的。重心的计算:因为飞机的总重量是组件所有单个重量的总和,重心是各部件的平均位置。
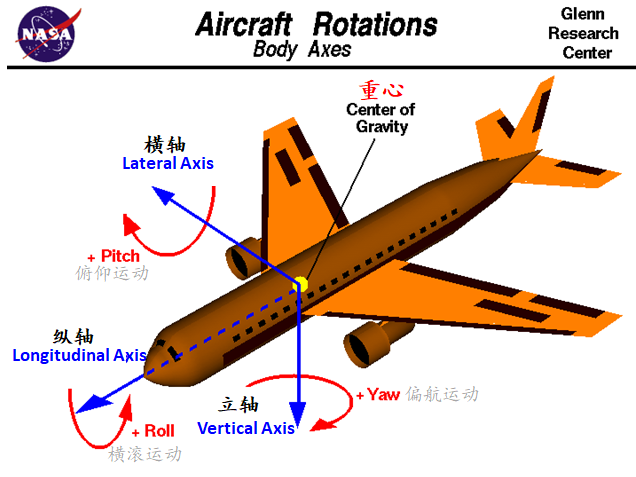
我们可以根据和力矩定理确定重心,我们选择一个参考位置或一条参考线。
整个飞机的总重量乘以重心到参考线的距离等于飞机上每个部件的重量_乘以每个部件对应到参考线的距离_。
W∗cg(飞机整体)=w∗d(机身)+w∗d(机翼)+w∗d(尾翼)+w∗d(发动机)……
直接测量法(平衡法)
直接测量法:用两块楔形木块或左右手各一个手指对称地在左右机翼下表面支撑固定翼无人机,并沿机身纵轴方向前后移动,当固定翼无人机处于水平状态时,楔形木块或手指所支撑的位置是重心位置。
吊线法(悬挂发)
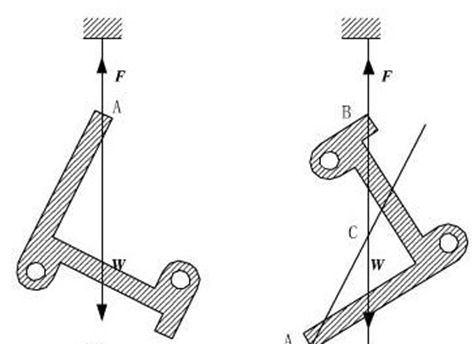
吊线法:通过两次起吊固定翼无人机,重锤线相交点就是重心位置,这种方法可以同时测得重心的前后和上下位置。
机翼的空气动力可以认为是作用在压力中心上。机翼压力中心和固定翼无人机重心的距离直接关系到固定翼无人机的俯仰平衡。机翼压力中心的位置以离机翼前缘的距离来衡量,则重心位置也应换算为以机翼前缘为起点,位置距离用机翼翼弦的百分数来表示。
如果机翼的外形不是矩形,则要利用“平均气动弦长"的概念。平均气动弦长是指虚拟的与该机翼面积相等,在同一迎角下有相同空气动力合力和压力中心位置的矩形机翼的弦长,沿机身向后为正。即平均空气动力弦就是一个假想的矩形机翼的翼弦,这个假想的矩形机翼的面积、空气动力和俯仰力矩等特性都与原机翼相同。一般使用时取其与平均气动弦长的比值来表示。重心因机翼翼型、平面形状、安装角、尾翼面积等的不同而不同。
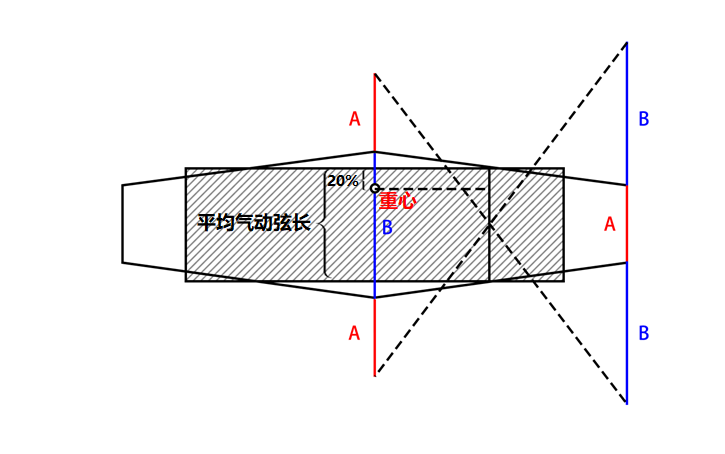
这是张图解释了如何找到无人机的CG(重心)一个近似值。
看一个机翼的右半边。分别使用翼根弦长和翼尖弦长“ A”和“ B”,如下图所示。虚线相交的位置将是您的平均气动弦位置。如果将机翼转换为直的矩形截面,则平均空气动力学弦(MAC)可以被视为等效弦。
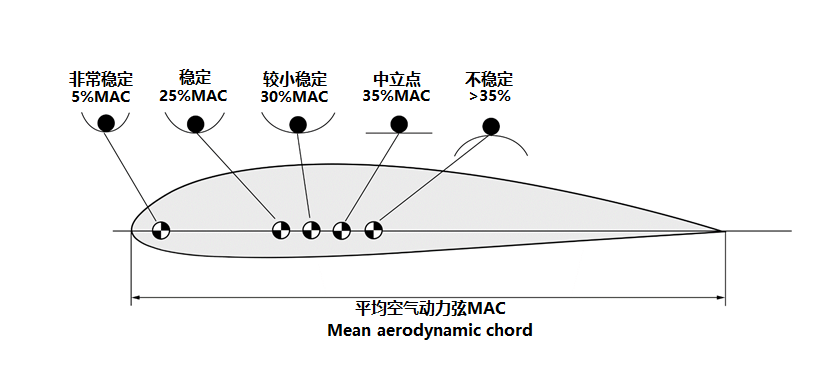
我们找到了平均空气动力弦,我们现在可以找到合适的CG位置。根据一般经验,CG不应超过MAC的30%,即从前沿到CG的距离应为MAC长度的30%。超过这一点,模型可能会显示不稳定的特征,较小的升降舵操作或是突发的阵风都会使飞机剧烈俯仰。一些航模特意将重心放置在机尾上,以实现我们经常看到的特技动作。下图说明了MAC上的各个位置及其对俯仰稳定性的影响。
固定翼无人机的坐标轴和力矩
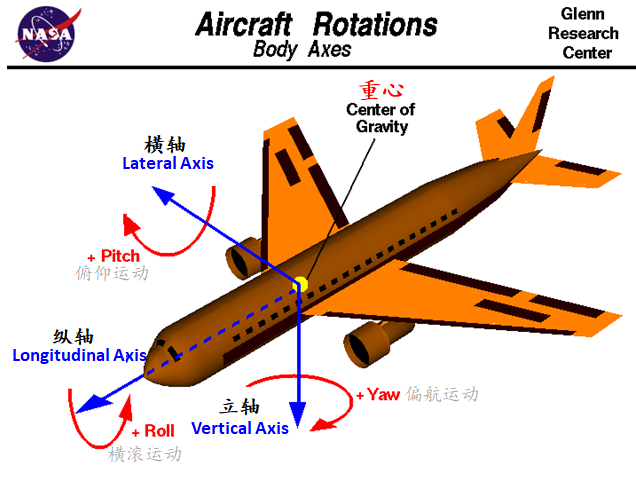
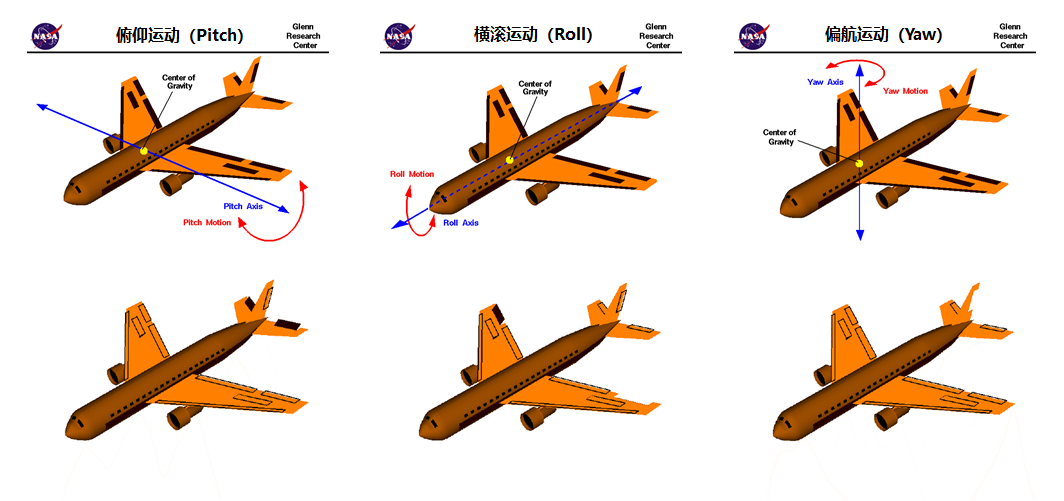
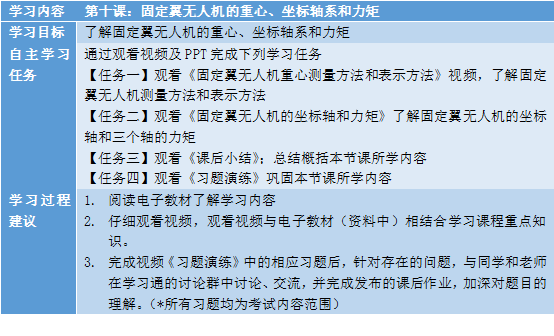
无人机在三维空间中,由三个坐标轴组成了一个机体坐标系,这三个坐标轴分别是横轴、纵轴和立轴,这三个坐标轴的中心点就是无人机的重心。飞机的姿态角就是绕着三个轴转动而产生的:俯仰运动、横滚运动和偏航运动。绕机体纵轴的转动,称为滚转运动;绕机体立轴的转动,称为偏航运动;绕机体横轴的转动,称为俯仰运动。
研究飞机的平衡、稳定性和操纵性原理时,为了描述固定翼无人机的空同位置、运动轨迹、气动力和力矩等向量,需要采用相应的坐标系。常用的坐标系有地面坐标轴系、机体坐标轴系、气流坐标轴系和航迹坐标轴系等。这些坐标系都是三维正交右手系为了方便研究问题,一般选用机体坐标轴系来研究固定翼无人机的运动规律。
机体坐标轴体系Ox_1y_1 z_1是固定在固定翼无人机上、随固定翼无人机一起转动的坐标系,其原点O位于固定翼无人机的重心一固定翼无人机的机体轴线有三个,它们都相交于固定翼无人机的重心,并且两两相互垂直。沿着机身长度方向,在固定翼无人机对称面内由机尾通过重心指向机头的直线称为固定翼无人机的纵轴Ox,指向机头的方向为正方向;从左机翼通过固定翼无人机重心到右机翼并与纵轴垂直的直线称为固定翼无人机的横轴Oz,指向右机翼方向为正方向;通过固定翼无人机的重心并垂直于纵轴和横轴,指向固定翼无人机上方的直线称为固定翼无人机的立轴Oy,指向上方为正方向。
飞行中固定翼无人机姿态的改变都是绕着以上三个轴中的一个或多个转动的,固定翼无人机绕机体纵轴的转动,称为滚转运动;固定翼无人机绕机体立轴的转动,称为偏航运动;固定翼无人机绕机体横轴的转动,称为俯仰运动。
作用在固定翼无人机上的力矩:把作用在固定翼无人机上的力矩沿机体的0个坐标轴进行分解,得到个力矩分量,即俯仰力矩、偏航力矩和滚转力矩。
俯仰力矩:俯仰力矩也称为纵向力矩,它的作用是使固定翼无人机绕横轴做抬头或低头转动(称为俯仰运动)。升降舵向上偏转,将引起正的俯仰力矩使固定翼无人机抬头;升降舵向下偏转,将引起负的俯仰力矩,使固定翼无人机低头。
偏航力矩:偏航力矩的作用是使固定翼无人机绕立轴做旋转运动。方向舵向左偏,将引起正的力矩,使固定翼无人机向左偏转;方向舵向右偏,将引起负的偏航力矩,使固定翼无人机向右偏转。
滚转力矩:滚转力矩也称为倾斜力矩,它的作用是使固定翼无人机绕纵轴做滚转运动。副翼的莊改变了左右机翼上的升力,从而产生固定翼无人机绕纵轴转动的滚转力矩。由于副#的正向定义(右副翼向下偏转,左副翼向上偏转)的缘故,副翼的正偏转角将引起负的滚转力矩,使固定翼无人机向左滚转。
课后小结

课堂测验
习题演练

