
-
1 教案
-
2 课件
-
3 教案
-
4 视频
-
5 作业
固定翼无人机的平衡及稳定性基本概念
自学任务
固定翼无人机的平衡
固定翼无人机的平衡是指作用于固定翼无人机的各力之和为零,各力对重心所产生的各力矩之和也为零。固定翼无人机处于平衡状态时,飞行速度的大小和方向都保持不变,也不绕重心转动;反之,固定翼无人机处于不平衡状态时,飞行速度的大小和方向将发生变化,并绕重心转动。固定翼无人机能否自动保持平衡状态,是稳定性的问题;如何改变其原有的平衡状态,则是操纵性的问题。研究固定翼无人机的平衡,是分析固定翼无人机稳定性和操纵性的基础,
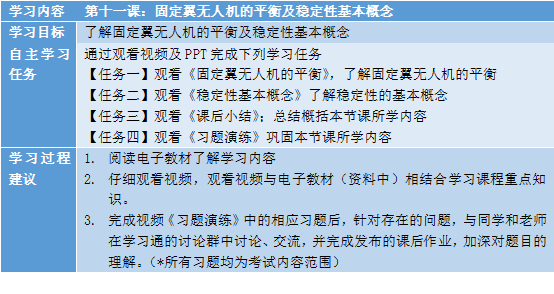
.固定翼无人机俯仰平衡的定义
当固定翼无人机作等速直线运动,没有绕横轴(z轴)转动时固定翼无人机就处于俯仰平衡状态。固定翼无人机处于俯仰平衡状态时,作用于固定翼无人机的各俯仰力矩之和为零,固定翼无人机迎角保持不变。
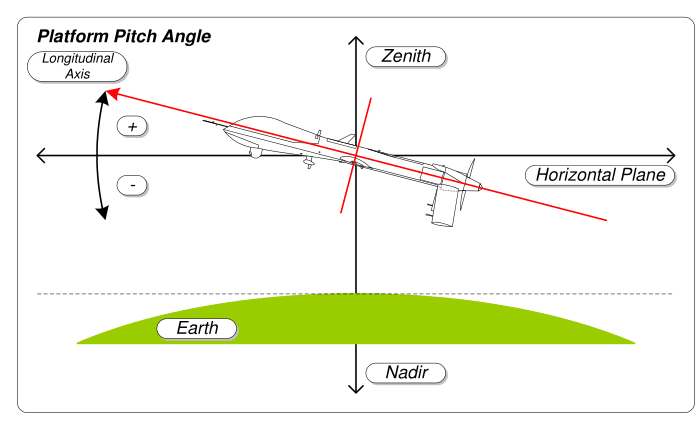
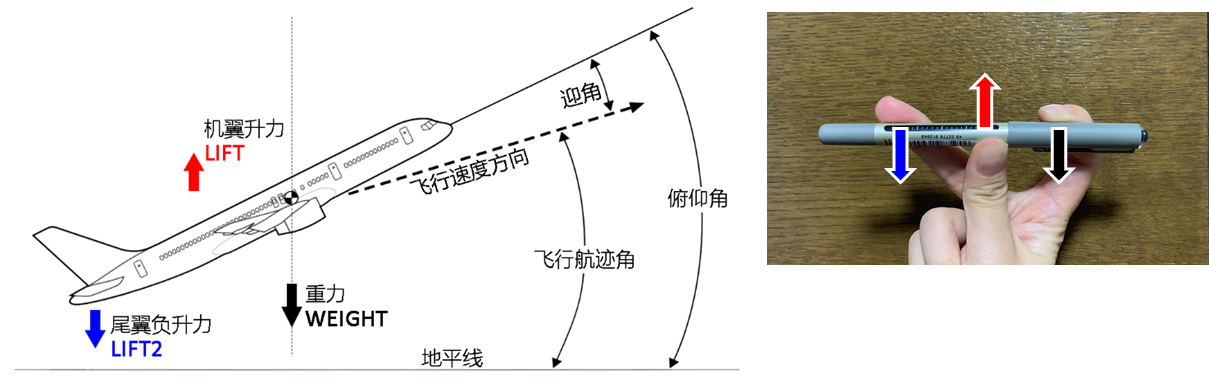
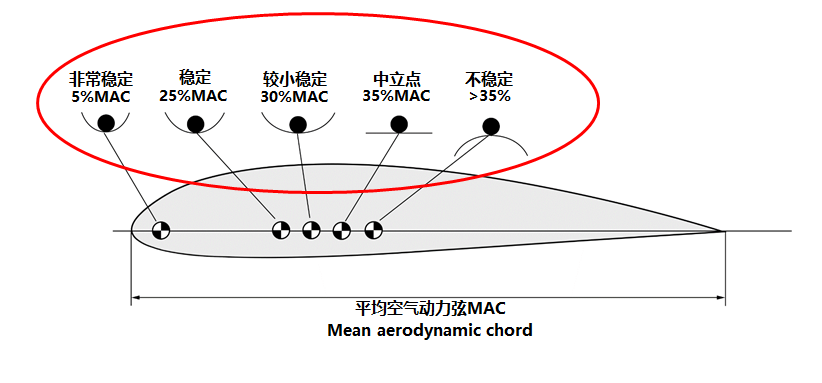
2.固定翼无人机俯仰平衡状态的类型★重点内容
固定翼无人机俯仰平衡状态有以下三种:
1)机翼升力正好在重心上。
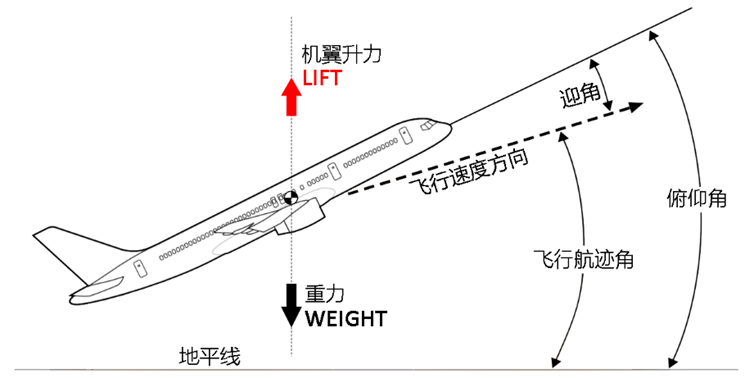
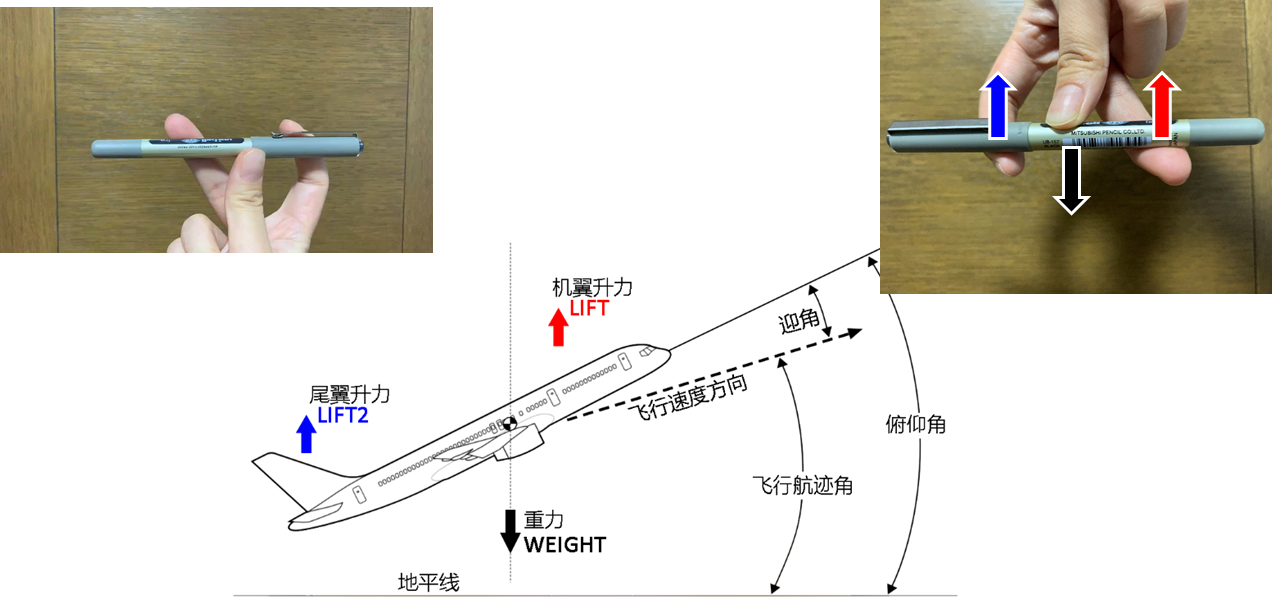
2)机翼升力在重心前面,这时水平尾翼要产生升力来平衡机翼升力对重心的力矩。
3)机翼升力在重心的后面,这时水平尾翼产生负升力。
飞行的时候,作用在固定翼无人机上的外力有可能起变化(如由于突风使气流迎角发生变化),重心位置也会变化(如由于燃油消耗而使重心变化这样,原来平衡的俯仰力矩可能遭到破坏。要想恢复俯仰平衡,就要靠固定翼无人机本身的稳定性,或者自动驾驶仪控制伺服机构通过操纵升降舵来实现(操纵性),
固定翼无人机的平衡是指作用于固定翼无人机的各力之和为零,各力对重心所产生的各力矩之和也为零。固定翼无人机处于平衡状态时,飞行速度的大小和方向都保持不变,也不绕重心转动;反之,固定翼无人机处于不平衡状态时,飞行速度的大小和方向将发生变化,并绕重心转动。固定翼无人机能否自动保持平衡状态,是稳定性的问题;如何改变其原有的平衡状态,则是操纵性的问题。研究固定翼无人机的平衡,是分析固定翼无人机稳定性和操纵性的基础,
.固定翼无人机俯仰平衡的定义
当固定翼无人机作等速直线运动,没有绕横轴(z轴)转动时固定翼无人机就处于俯仰平衡状态。固定翼无人机处于俯仰平衡状态时,作用于固定翼无人机的各俯仰力矩之和为零,固定翼无人机迎角保持不变。
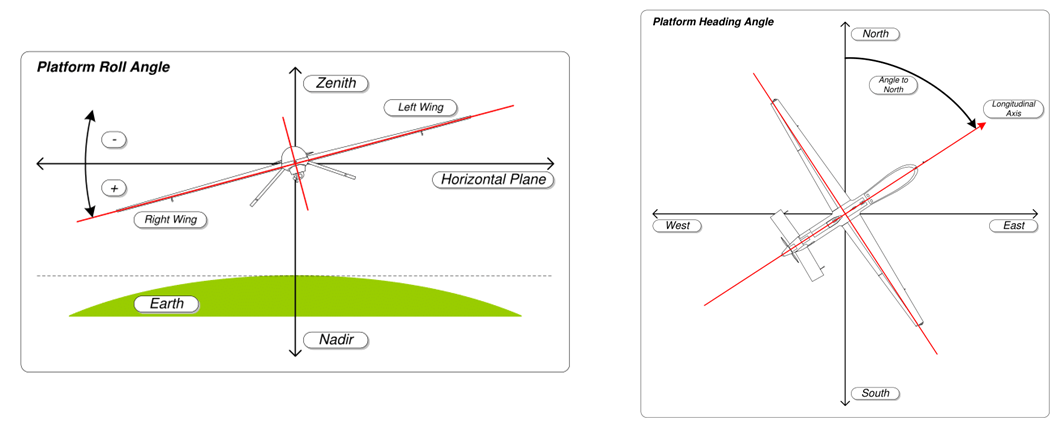
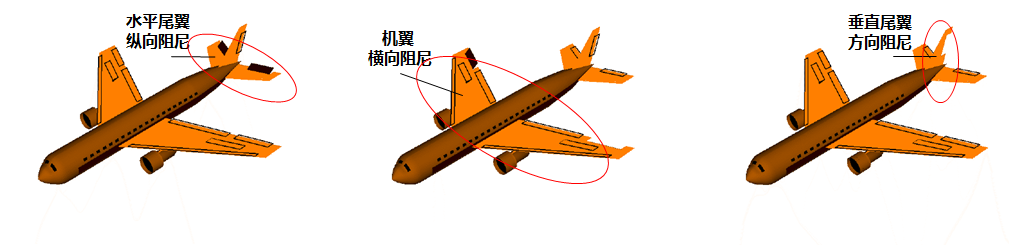
1.固定翼无人机方向平衡的定义
当固定翼无人机做等速直线运动,没有绕竖轴(y轴)转动时固定翼无人机就处于方向(航向)平衡状态。固定翼无人机处于方向平衡状态时,作用于固定翼无人机的各偏转力矩之和为0,固定翼无人机航向保持不变。
2,固定翼无人机横向平衡的定义
当固定翼无人机做等速直线运动,没有绕纵轴(x轴)转动时固定翼无人机就处于横向平衡状态。固定翼无人机处于横向平衡状态时,作用于固定翼无人机的各滚转力矩之和为0,固定翼无人机不绕纵轴滚转,飞行姿态坡度保持不变。
3,固定翼无人机方向平衡与横向平衡的关系
固定翼无人机的横向平衡和方向平之间有着密切的联系。横向平衡如果受到破坏,必然会引起方向平衡的破坏,反之亦然。因此这两种平衡不能完全分开,把横向平衡和方向平衡综合起来考虑时称为侧向平衡。实际的调整方法有:使翼尖部分有扭角(外翼区翼型角度与翼根的不同)、斜装机翼、斜拉力线等·当固定翼无人机能够进行稳定的盘旋上升时,即已经达到横向和方向平衡。
有些情况不平衡所引起的变化是趋向于安全方面,固定翼无人机还是可以飞得很好。如,起飞后廾始升时固定翼无人机向左倾斜很厉害,即使没人操纵遥控它能逐渐减少傾斜程度以后转变为稳定上升,盘旋半径不管愈转愈大或愈转愈小,只要不出现下坠倾向,就可以说整个飞行稳定,但实际上周定翼无人机的力厙平衡始终没有达到·因此也没有必要强调固定翼无人机在飞行中一定要达到各种各样的平衡。
稳定性的基本概念
固定翼无人机的稳定性是指固定翼无人机受扰动偏离原来的平衡位置后,不需要自动驾驶仪的干预.靠自身特性能自动恢复到原来平衡状态的能力.固定翼无人机的稳定性是固定翼无人机本身具有的一种特性,它不是一成不变的,而是随着飞行条件的改变而变化的。固定翼无人机的稳定性与操纵性有着密切的关系,要学习固定翼无人机的操纵性,就必须先懂得固定翼无人机的稳定性。
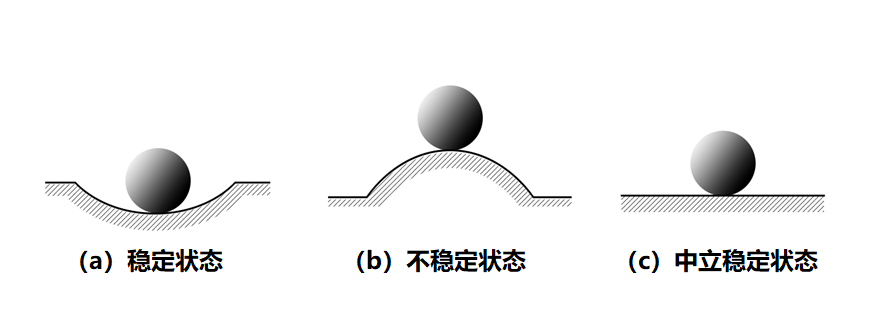
为了更好地说明稳定性的概念和分析具备稳定性的条件,首先来研究圆球的稳定问题·圆球的三种稳定状态,设圆球原来处于平衡状态。现在给它一个瞬时小扰动,例如推它一下,使其偏离平衡状态,然后来讨论在扰动去除后,圆球是否能自动回到原来的平衡状态。
 ★重点内容
★重点内容
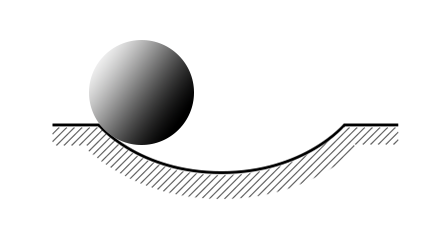
(1)稳定状态
稳定状态的圆球,在扰动取消后,其在弧形槽中经过若干次来回摆动,最后自动地恢复到原来的平衡位置,这种情况称为稔定状态。
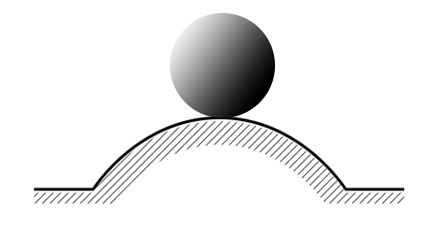
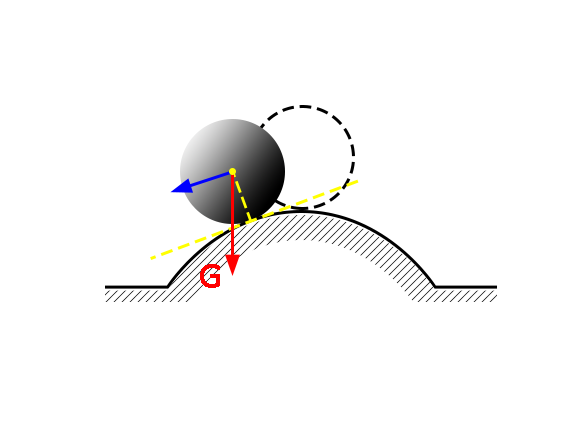
(2)不稳定状态
不稳定状态的圆球,在扰动取消后,其沿弧形坡道滚下,离原来的平衡位置越来越远,不能自动地恢复到原来的平衡位置,这种情况称为不稳定状态。
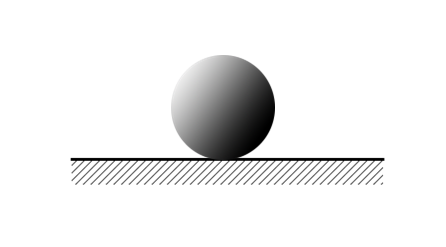
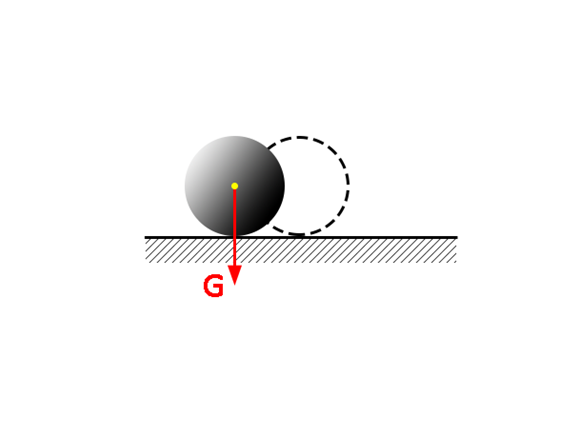
(3)中立稳定状态
中立稳定状态的圆球,在扰动取消后,就停在扰动消失时的位置,既不继续偏离原来的平衡位置,也不自动地恢复到原来的平衡位置,这种情况称为随遇稳定或中立稳定状态。
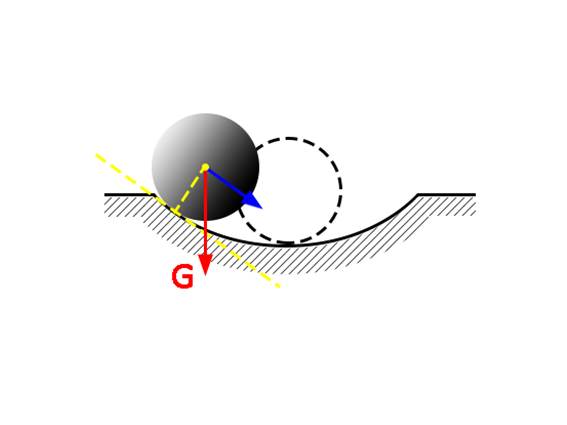
a.稳定力矩
圆球偏离平衡位置后,其重力在平行于弧形曲线切线的方向上的分力,对圆球与弧形曲线的接触点(支持点)形成一个力矩,该力矩使圆球具有自动恢复到其原来平衡状态的趋势“这种力称为稳定力或恢复力。
b.不稳定力矩
圆球偏离平衡位置后.其重力在平行于形曲线切线的方向上的分力,对圆球与弧形曲线的接触点(支持点)形成一个力矩,该力矩使圆球继续偏离原来的平衡状态,是不稳定力矩,圆球不能自动回到原来的平衡位置上
c.中立稳定状态无力矩
圆球偏离平衡位置后,其重力与平面的支持力在同一条直线一上,对支持点不形成任何力矩,圆球既不继续加大偏离原来的平衡状态,也不会自动回到原来的平衡状态。
d.阻尼力矩★重点内容
圆球在弧形曲线上运动的阻力也对其支持点形成一个力矩,其方向和圆球运动方向相反,起到阻止摆动的作用,称为阻尼力矩,在此力矩作用下,圆球的摆幅来越小,最后停止在原来的平衡位置上,因而是稳定的。
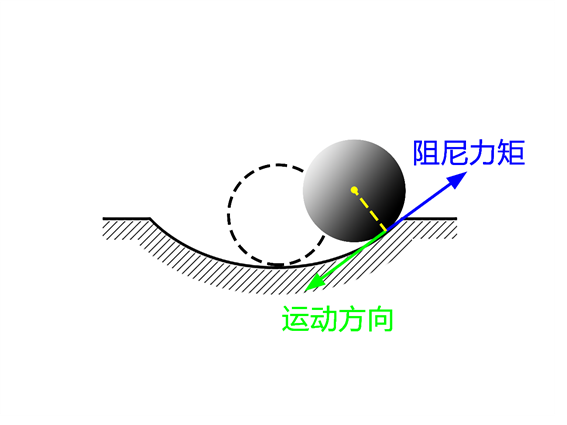
由此可知,欲使处于平衡状态的物体具有稳定性,其必要条件是物体在受到扰动后能够产生稳定力矩,使物体具有自动恢复到原来平衡状态的趋势;其次是在恢复过程中同时产生阻尼力矩,保证物体最终恢复到原来平衡状态

