
-
1 教学内容
-
2 课件
-
3 教案
-
4 视频
-
5 作业
固定翼无人机的稳定性
自学任务
固定翼无人机的稳定性
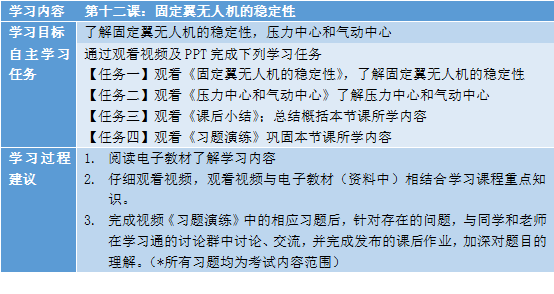
三种稳定状态
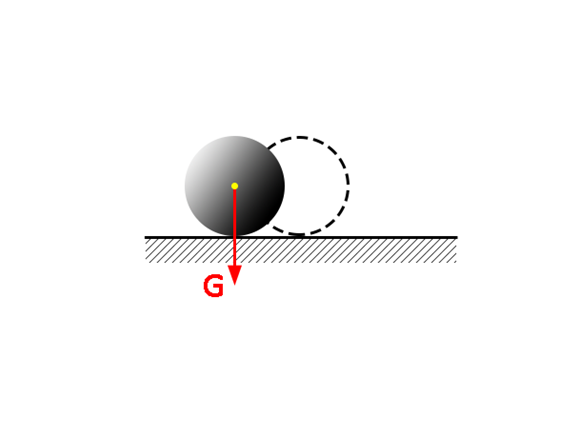
静稳定性静稳定性是指固定翼无人机受扰后出现稳定力矩,有自动回到原平衡状态的趋势.静隐定性是研究固定翼无人机受扰后的最初瞬间响应问题的,是研完固定翼无人机稳定性的最基本特性。静稳定性只表明固定翼无人机在外界扰动作用后的最初瞬间有无自动恢复到原来平衡状态的趋势,并不能说明固定翼无人机能否最终恢复到原来的平衡状态:周定翼无人机静稳定性有以下三种类型
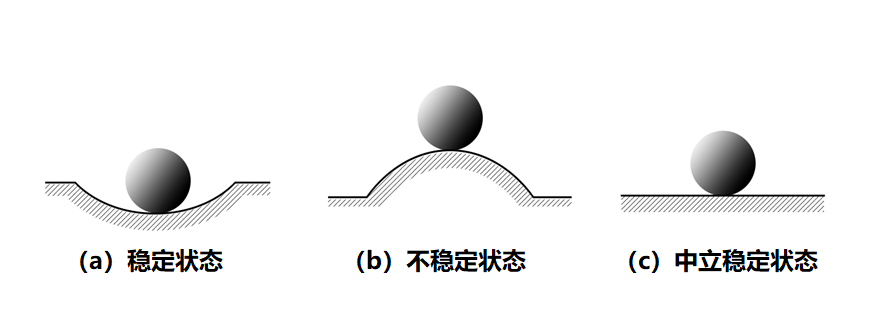
稳定力矩
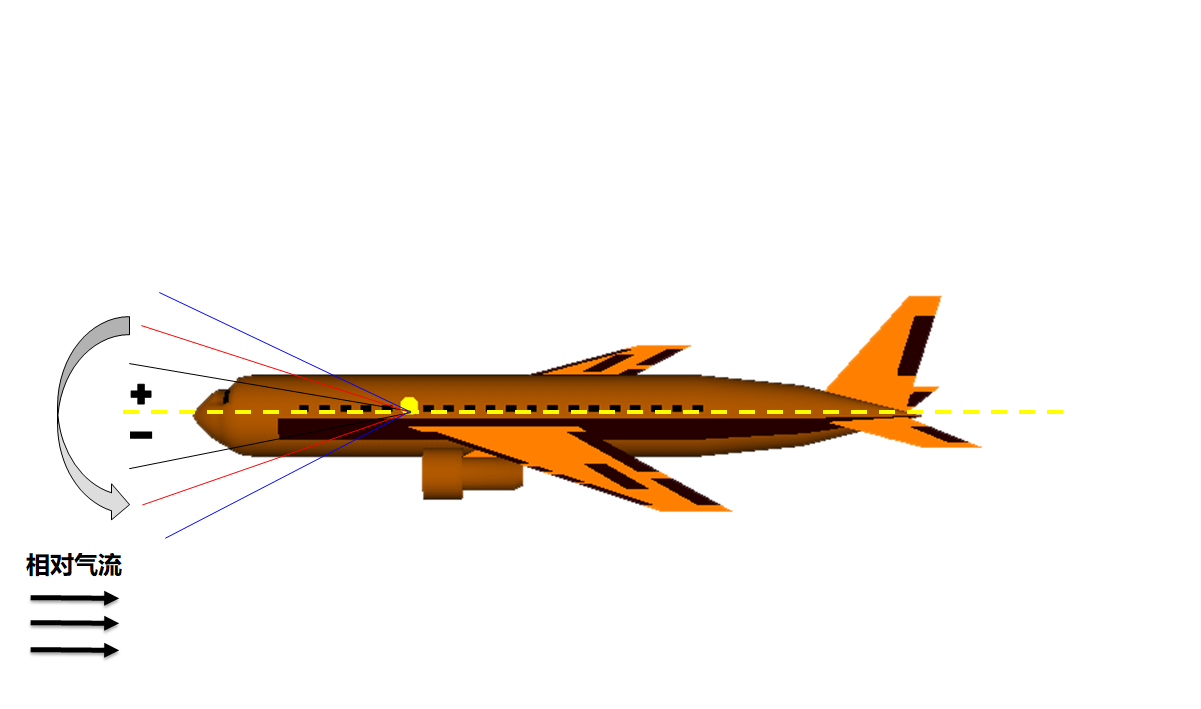
1、正静稳定性:如果固定翼无人机受扰动偏离平衡状态后,在最初瞬间所产生的是稳定力矩,有自动趋向回到原平衡状态的趋势,则固定翼无人机具有正静隐定性
2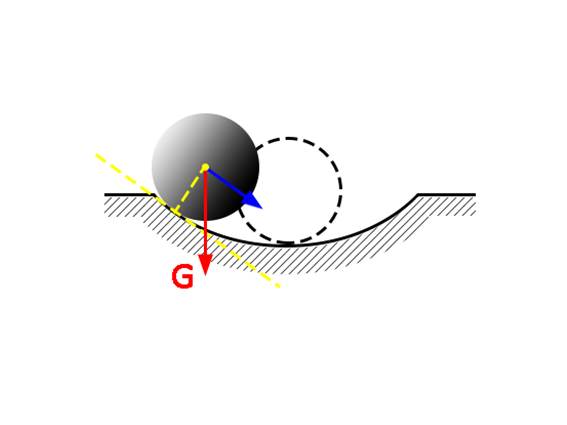
不稳定力矩
2、负静稳定性:如果固定翼无人机产生的是不稳定力№,趋向一于偏离原来的平衡状态,则称固定翼无人机具有负静稳定性
中立稳定状态无力矩
3、中立静稳定性“如果固定翼无人机趋向于维持編离后的姿态,即不恢复原来的平衡也不进一步偏离平衡,则称飞机具有中立静稳定性
动稳定性★重点内容
固定翼无人机的静稳定性和动稳定性之间有着非常密切的关系。静稳定性是动稳定性的前提,因为不具有静稔定性的固定翼无人机,受干扰后根本没有恢复原先平衡状态的倾向,当然更谈不上如何恢复到固定翼无人机的原先平衡状态了。但只用静稳定性还不能完全说明问题,因为固定翼无人机在恢复它原来平衡状态的过程中,并不一定能很快达到原先的飞行状态而可能摆动起来。摆动多少次才能平稳下来,这就是动稳定性问题。摆动次数越少,需要的时间越短,说明动稳定性越好。如果摆动愈来愈剧烈,就是动稳定性不好。一般来说,只要恰当地选择静稳定性的大小,就能保证获得良好的动稳定特性。
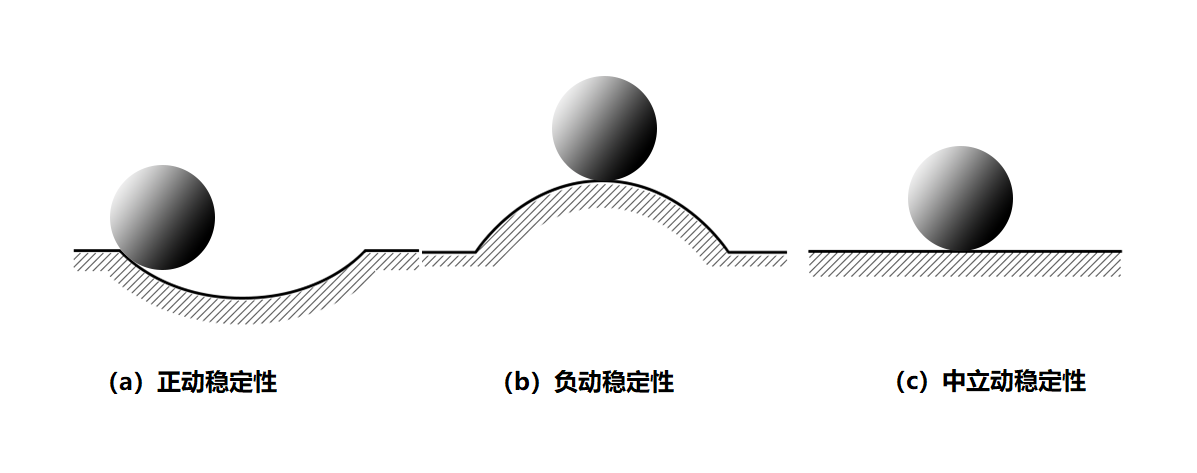
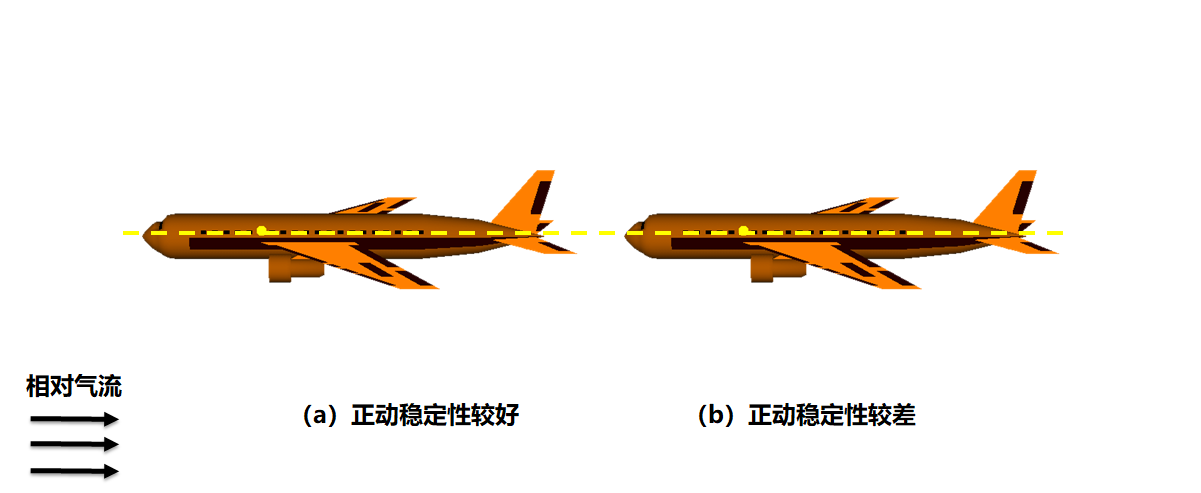
正动稳定性★重点内容
4、正动稳定性:如果固定翼无人机受扰动后偏离原平衡状态后,固定翼无人机摆动的振幅逐渐减小,最终恢复到原平衡状态,则称固定翼无人机具有正动稳定性。
负动稳定性★重点内容
5、负动稳定性:如果固定翼无人机摆动的振幅越来越大,固定翼无人机越来越偏离原状态,则称固定翼无人机具有负动稳定性。
中立动稳定性★重点内容
6、中立动稳定性。如果固定翼无人机摆动的振幅既不增大也不减小,则称为固定翼无人机具有中立动稳定性。
压力中心和气动重心
压力中心★重点内容
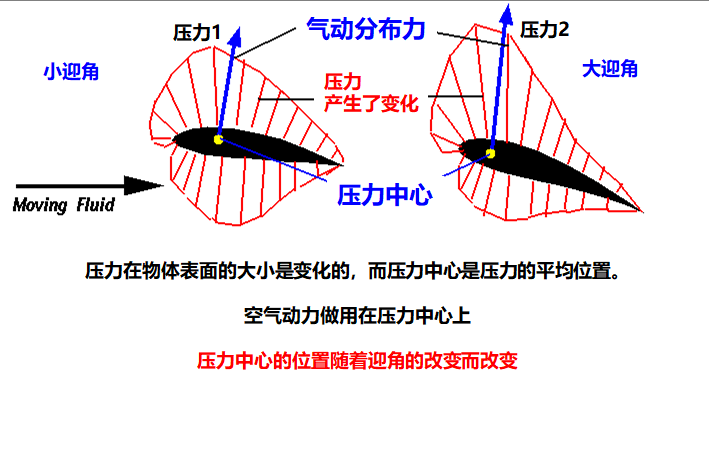
当物体在流体中移动时,流体的速度会围绕物体的表面变化。速度的变化会在物体表面产生压力变化。将压力乘以身体周围的表面积就可以确定物体上的空气动力。我们可以考虑该力通过物体表面上压力的平均位置起作用。我们将压力变化的平均位置称为压力中心,就像我们将物体重量的平均位置称为重心一样。
如果我们以迎角角度考虑机翼,我们可以(理论上)确定机翼周围的压力变化,并计算空气动力和压力中心,空气动力是作用在压力中心上的。但是,如果我们改变迎角,翼型上每个点的压力都会改变,压力分布就会改变,因此压力中心的位置就会改变。
因此,如果我们使用压力中心来分析力,那么确定翼型的空气动力学行为就非常复杂。所以,我们引入了一个新的概念:将空气动力中心用作施加空气动力的位置消除了在空气动力分析中压力中心随迎角的运动的问题。
力矩的概念★重点内容

气动中心★重点内容

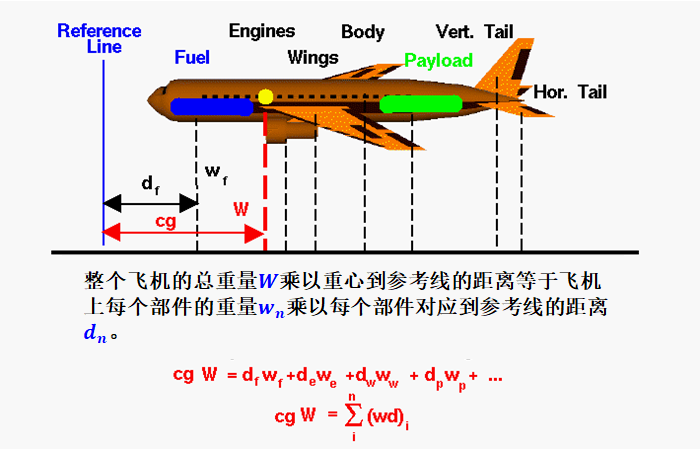
空气动力中心又是什么呢?空气动力中心简称为气动中心,又称为焦点。气动中心是使合力矩不变的点,我们想弄明白什么叫气动中心,就要先明白什么叫和力矩,矩是表示距离和物理量乘积吗,力矩就是力和力到作用点距离的乘积,合力矩表示合力和合力到作用点的乘积,大家是否有一个疑问,为什么力到作用点有距离,以前我们学的都是简单的力,力直接作用在作用点上,像是压力,推力,阻力等等,而力矩表示的力可以使物体绕一个点转动,这个点就是作用点,他们不在一起,所以力矩是一种转动效应的量度,我们可以从这个小视频来理解一下力矩的概念。明白了力矩,我们再接着说和力矩,在之前学计算无人机重心位置的时候,就提到过“合力矩定理”,当时我们说无人机总重量是各个部件重量的合力,所以无人机整体的重力就是一个合力,重心到参考平面的长度就是力臂,用重力的合力乘以力臂就可以得到合力矩,它等于所有分力(其他部件各自的重力)乘以它们各自对应的力臂(就是每个部件到参考面的距离),以上就是合力矩定理的内容。
从力矩的概念中,我们可以看出:在迎角变化引起气动力变化,不能确定力大小的情况,我们还可以通过力矩值与施加该力的参考点的关系入手从实验和理论上都发现,在大多数低速机翼上从前缘向后1/4弦的位置施加气动力,则气动力矩的大小几乎随迎角保持恒定,气动力学力矩保持恒定这一点的位置就为翼型的空气动力学中心(ac)。当把气动中心的位置作为参考点,任意迎角下压力中心(气动力的位置)到气动中心的距离乘以气动力大小,所得的气动力矩都是不变的:两点间力臂变大,气动力就变小,两点间力臂变小,气动力就变大,一直维持着空气动力和这两点间距离的乘积维持一个不变的值,这个值就是气动力矩。所以说对应气动中心这一点的气动力矩不随迎角的变化而变化,用气动中心这个概念使空气动力分析更加简单。
课后小结


