
本章学习要求:
1.建立测试的概念
2.了解测试装置特性对测量结果的影响
3.了解测试装置特性的测量方法
主要内容
•概述
•测试装置的静态特性
•测试装置的动态特性
•实现不失真测试的条件
•测试装置动态特性的测量
•负载效应
•测试装置的抗干扰
2.1:概述
![]() 测试装置是执行测试任务的传感器、仪器和设备 的总称。一般由三个基本
测试装置是执行测试任务的传感器、仪器和设备 的总称。一般由三个基本
环节组成:
这些装置和仪器对被测物理量进行传感、转换与处理、传送、显 示、记录以及存储。
 测试系统的复杂程度取决于被测信息检测的难易程度以及所采用的实验方法。
测试系统的复杂程度取决于被测信息检测的难易程度以及所采用的实验方法。
上图表示输入信号x(t)送入此组件后经过规定的传输特 性h(t)转变为输出信号y(t)。其中
h(t)为由此组件的物理性能 决定的数学运算法则。对比例放大环节h(t)可写成k(电子或 机
械装置的放大系数)
系统分析中的三类问题:
![]()
1)当输入、输出是可测量的(已知),可以通 过它们推断系统的传输特性。(系统辨识)
2)当系统特性已知,输出可测量,可以通 过它们推断导致该输出的输入量。 (反求)
3)如果输入和系统特性已知,则可以推断 和估计系统的输出量。(预测)
静态测量:如果测量时,测试装置的输入、输出信号不随时间而变化(或变化比较缓慢)


动态测量:当输入随时间变化时,其输出随输入而变化
![]()
测试装置基本要求
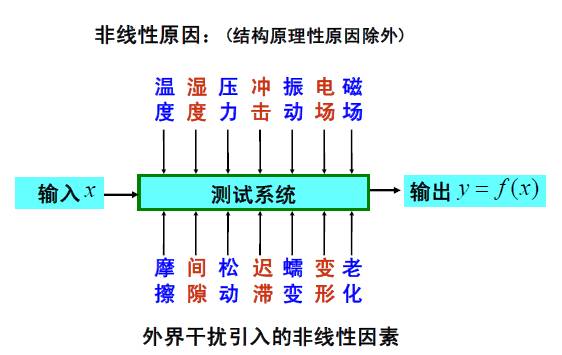
理想的测试装置应该具有单值的、确定的输入——输出关系。对于每一输入量都应该只有单一的输 出量与之对应。知道其中一个量就可以确定另一个量。其中以输出和输入成线性关系最佳。实际的测试装置只能在较小的范围和一定的误差 允许范围内满足线性要求。
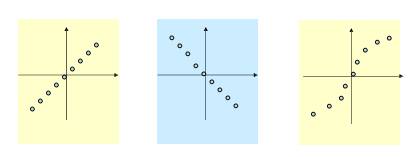
线性y 线性y 非线性y
理想的测试系统应该具有单值的、确定的输入― 输出关系。其中以输出和输入成线性关系为最佳。
在静态测量中,测量系统的这种线性关系虽说总 是所希望的,但不是必须的,因为在静
态测量中可用 曲线校正或输出补偿技术作非线性校正。
在动态测量中,测量工作本身应该力求是线性系 统,这不仅因为目前只有对线性系统才能作比较完善 的数学处理与分析,而且也因为在动态测试中作非线性校正目前还相当困难。
线性系统及其主要性质
时不变线性系统/定常线性系统
——系统的输入与输出的关系可用常系数线性微分方程来描述的系统。

严格的说,很多物理系统是时变的(因为不稳定 因素的存在),但在工程上常可以以足够的精确度认 为大多数常见物理系统是时不变系统,即:一般在工程 中使用的测试装置都是线性系统。
线性系统性质:
a)叠加性 系统对各输入之和的输出等于各单个输入的输出之和,即
若 x1(t)→ y1(t),x2(t)→ y2(t)
则 x1(t)±x2(t)→ y1(t)±y2(t)
说明:①一个输入引起的输出并不因其他的输入的存在而受到影响;
②对于一个复杂的输入,可将其分解成一系列简单输入之和。
b)比例性 常数倍输入所得的输出等于原输入所得输出的
常数倍,即:
若 x(t) →y(t) 则 kx(t)→ ky(t)
c)微分性 系统对原输入信号的微分等于原输出信号的
微分,即
若 x(t)→ y(t)
则 x'(t)→ y'(t)
d)积分性
当初始条件为零时,系统对原输入信号的积 分等于原输出信号的积分,即
若 x(t) → y(t)
则 ∫x(t)dt→ ∫y(t)dt
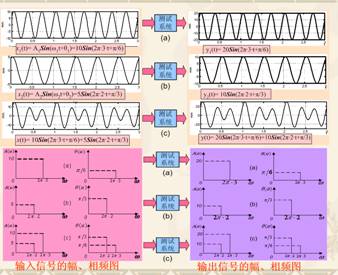
e)频率保持性
若系统的输入为某一频率的谐波信号,则系统 的稳态输出将为同一频率的谐波信号,即:
若 x(t)=Acos(ωt+φx) 则 y(t)=Bcos(ωt+φy) 线性系统的这些主要特性,特别是符合叠加原理和频率保持性,在测量工作中具有重要作用。
应用:
①利用此性质判断噪声,进而利用相应的滤波技术,提取有用的信息;
②判断系统是否是线性系统;
③故障诊断;
④用实验的方法研究系统的响应特性。
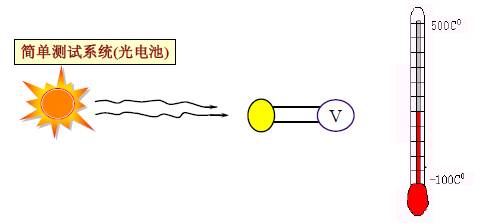
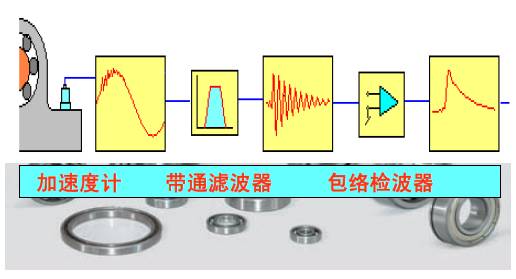
简单测试系统
复杂测试系统(轴承缺陷检测)
不失真测量:
测试装置的性质
•静态特性
•动态特性
•负载特性
•抗干扰性

