常见题型精解
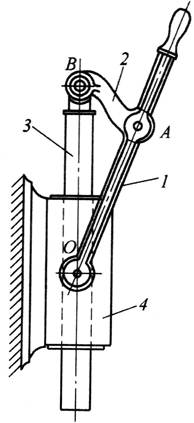
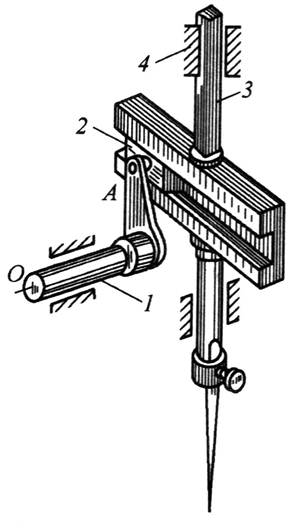
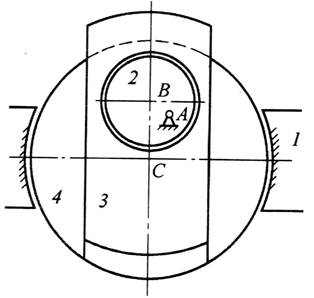
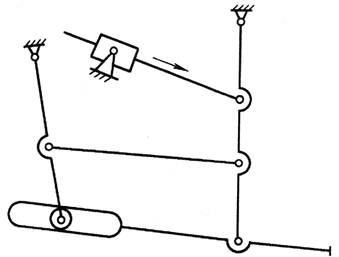
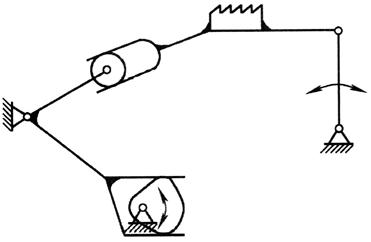
例1.1 试绘制图1.1(a)所示偏心回转油泵机构的运动简图(其各部分尺寸可由图中直接量取),并判断该机构是否具有确定的运动。图中偏心轮1绕固定轴心A转动,外环2上的叶片a在可绕轴心C转动的圆柱3中滑动。当偏心轮1按图示方向连续回转时,可将低压油由右端吸入,高压油从左端排出。

图1.1(a)
答案
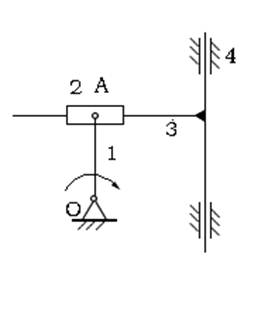
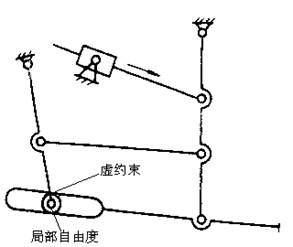
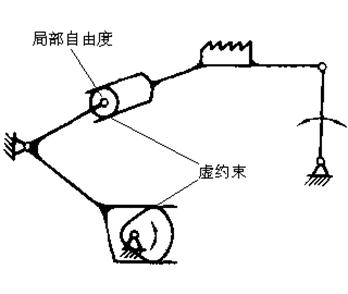
(1)选取合适的长度比例尺 绘制此机构的运动简图,如图1.1(b)所示。
绘制此机构的运动简图,如图1.1(b)所示。

图1.1(b)
(2)计算机构的自由度
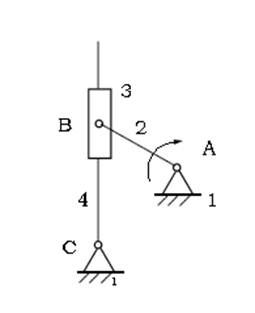
此机构为曲柄摇块机构。由图1.1(b)可知 ,
, ,
, ,由式(1-1)计算该机构的自由度为
,由式(1-1)计算该机构的自由度为

又该机构有一个原动件,所以此机构具有确定的运动。
【评注】
绘制机构运动简图时,关键是分析相连两个构件的约束关系,确定运动副的类型,然后再用规定的符号表示出来。
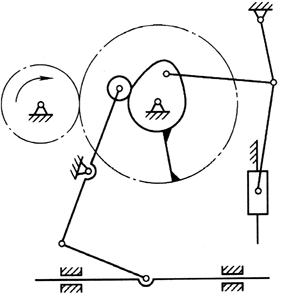
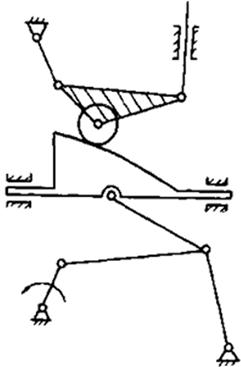
例1.2 试计算图1.2所示凸轮—连杆组合机构的自由度。
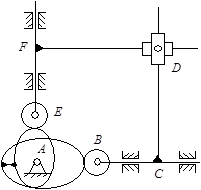
图1.2
答案
在图1.2中,B,E两处的滚子转动为局部自由度,C,F处虽各有两处与机架接触构成移动副,但都各算一个移动副,该机构在D处虽存在轨迹重合的问题,但由于D处相铰接的双滑块为一个自由度为零的Ⅱ级杆组,即D处未引入约束,故机构中不存在虚约束。
将机构中的局部自由度除去不计,则有 ,
, ,
, ,于是可得该机构的自由度为
,于是可得该机构的自由度为

【评注】
注意,如果将该机构中D处相铰接的双滑块改为相固联的十字滑块时,则机构中就存在一个虚约束。在机构中,两构件构成运动副所引入的约束起着限制两构件之间某些相对运动,使相对运动或自由度减少的作用。但在机构中,某些运动副和构件带入的约束可能与机构所受的其他约束相重复,因而对机构的运动实际上不起约束作用,这种约束就是虚约束。
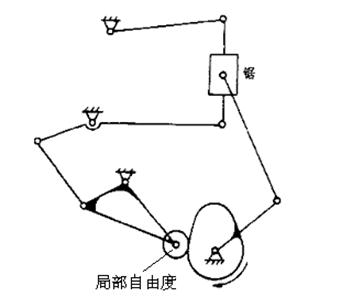
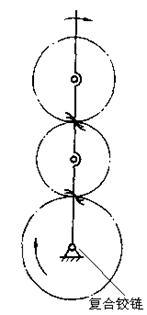
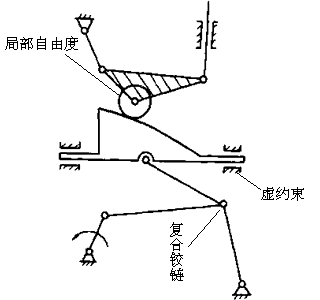
例1.3 试计算图1.3所示的精压机构的自由度。

图1.3
答案
由图1.3可以发现,该机构中存在结构对称部分,从传递运动的独立性来看,有机构ABCDE就可以了,而其余部分为不影响机构运动传递的重复部分,故引入了虚约束。
将机构中引入虚约束的重复部分去掉不计,则, (C处为复合铰链),,于是可得该机构的自由度为
(C处为复合铰链),,于是可得该机构的自由度为

【评注】
存在虚约束的机构,一般常具有相似或对称部分的结构特征。所以,如研究的机构在结构上具有相似或对称部分,就有可能存在虚约束,因而就要注意分析,以免发生错误。
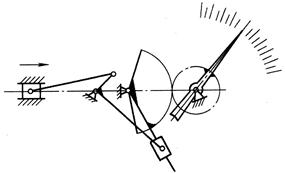
例1.4 试计算图1.4所示机构的自由度。
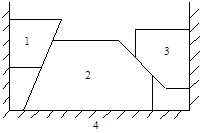
图1.4
答案
图1.4所示的楔块机构全由移动副组成,此机构中, ,于是由式(1-2)可得该机构的自由度为
,于是由式(1-2)可得该机构的自由度为

【评注】
这里应注意,若机构中只存在移动副,在各构件之间不出现相对转动,这时机构自由度的计算不能用式(1-1),只能用式(1-2)来计算,否则会导致计算错误。
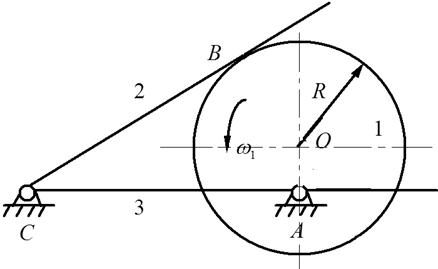
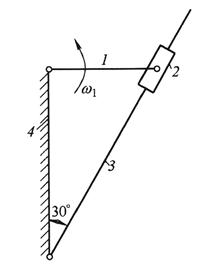
例1.5 图1.5所示的凸轮机构中,已知 ,
, ,
, ,
, ,凸轮1 以等角速度
,凸轮1 以等角速度 逆时针转动,比例尺
逆时针转动,比例尺 。试用瞬心法求从动件2的角速度
。试用瞬心法求从动件2的角速度 。
。
答案
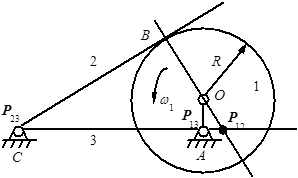
图1.5
由三心定理求出所需的瞬心 ,
, 和
和 ,则点处的速度为
,则点处的速度为

则  (逆时针)
(逆时针)
【评注】
利用速度瞬心法对某些平面机构,特别是平面高副机构,进行速度分析是比较简便的。求两构件的角速度之比,一般先分别求出两构件与机架的瞬心(绝对瞬心)和这两个构件的瞬心(相对瞬心),然后连接三点成一直线,那么两构件的角速度之比等于其绝对速度瞬心连线被相对速度瞬心分得的两线段的反比。如果两构件的相对瞬心内分该连线,则两构件转向相反,反之则转向相同。
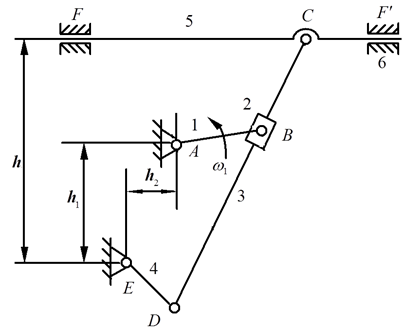
例1.6 已知一牛头刨床机构的机构运动简图如图1.6所示,设在图示瞬间构件1的角速度为 ,机构各部分尺寸见图。
,机构各部分尺寸见图。
(1) 计算此机构的自由度;
(2) 试求图示位置滑枕的速度 。
。
答案
(1)计算机构的自由度
在该机构中,,(F和 处的移动副只能算一个),
处的移动副只能算一个), ,因此该机构的自由度为
,因此该机构的自由度为

(2)速度分析
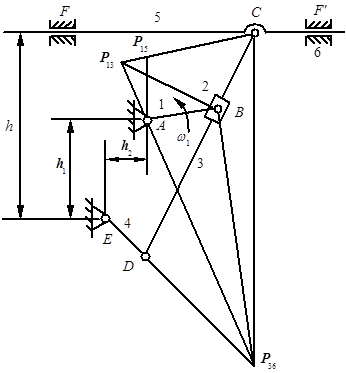
图1.6
先求出构件3的绝对瞬心 的位置,再求出瞬心的位置。因为为构件1和3的等速重合点,所以
的位置,再求出瞬心的位置。因为为构件1和3的等速重合点,所以


 与
与 转向相同,因为外分连线
转向相同,因为外分连线 。则有
。则有
 (水平向左)
(水平向左)
或者求出瞬心 的位置,直接利用瞬心求得
的位置,直接利用瞬心求得
 (水平向左)
(水平向左)
【评注】
应用速度瞬心进行平面机构的速度分析,就是利用瞬心是两构件的等速重合点这一桥梁,将两个构件的速度在瞬心处直接联系起来。
课后习题详解
【1-1】 绘出图示机构的机构运动简图。
答案
机构运动简图如图所示。

【1-2】 绘出图示机构的机构运动简图。

答案
机构运动简图如图所示。

【1-3】 绘出图示机构的机构运动简图。
答案
机构运动简图如图所示。
【1-4】 绘出图示机构的机构运动简图。
答案
机构运动简图如图所示。
【1-5】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。
答案
复合铰链、局部自由度和虚约束如图所示。

【1-6】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。

答案
复合铰链、局部自由度和虚约束如图所示。

【1-7】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。

答案

【1-8】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。
答案

【1-9】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。
答案
复合铰链、局部自由度和虚约束如图所示。

【1-10】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。
答案
复合铰链、局部自由度和虚约束如图所示。


【1-11】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。
答案
复合铰链、局部自由度和虚约束如图所示。

【1-12】指出下列机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。
答案
复合铰链、局部自由度和虚约束如图所示。

【1-13】 求出图示导杆机构的全部瞬心和构件1、3的角速比 。
。
答案
该导杆机构的全部瞬心如图所示,构件1、3的角速比为:
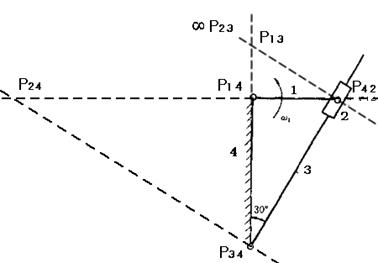
图1.23 题1-13图
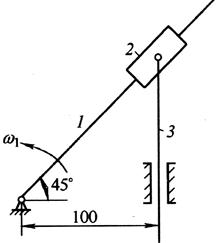
【1-14】 求出图示正切机构的全部瞬心。设 ,求构件3的速度
,求构件3的速度 。
。
答案
该正切机构的全部瞬心如图所示,构件3的速度为: ,方向垂直向上。
,方向垂直向上。
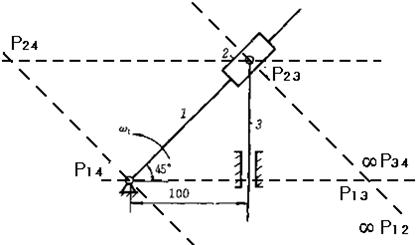
图1.24 题1-14图
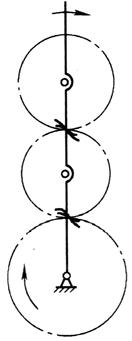
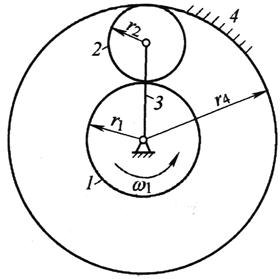
【1-15】 如图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度之比 。
。
答案
要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即, 和
和 ,如图所示。则:
,如图所示。则:
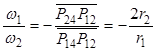 ,轮2与轮1的转向相反。
,轮2与轮1的转向相反。
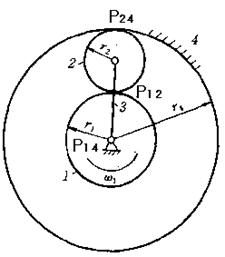
图1.25 题1-15图
【1-16】 试论证:
(1)图a所示的构件组合是不能产生相对运动的刚性桁架:
(2)这种构件组合若满足图b所示尺寸关系:AB=CD=EF,BC=AD,BE=AF,则构件之间可以产生相对运动。
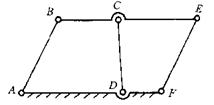
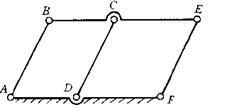
(a) (b)
图1.26 题1-16图
答案
(1)图a中的构件组合的自由度为:

自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD杆是虚约束,去掉与否不影响机构的运动。故图b中机构的自由度为:

所以构件之间能产生相对运动。




